 机器人编程说明
机器人编程说明

《机器人编程说明》由会员分享,可在线阅读,更多相关《机器人编程说明(14页珍藏版)》请在装配图网上搜索。
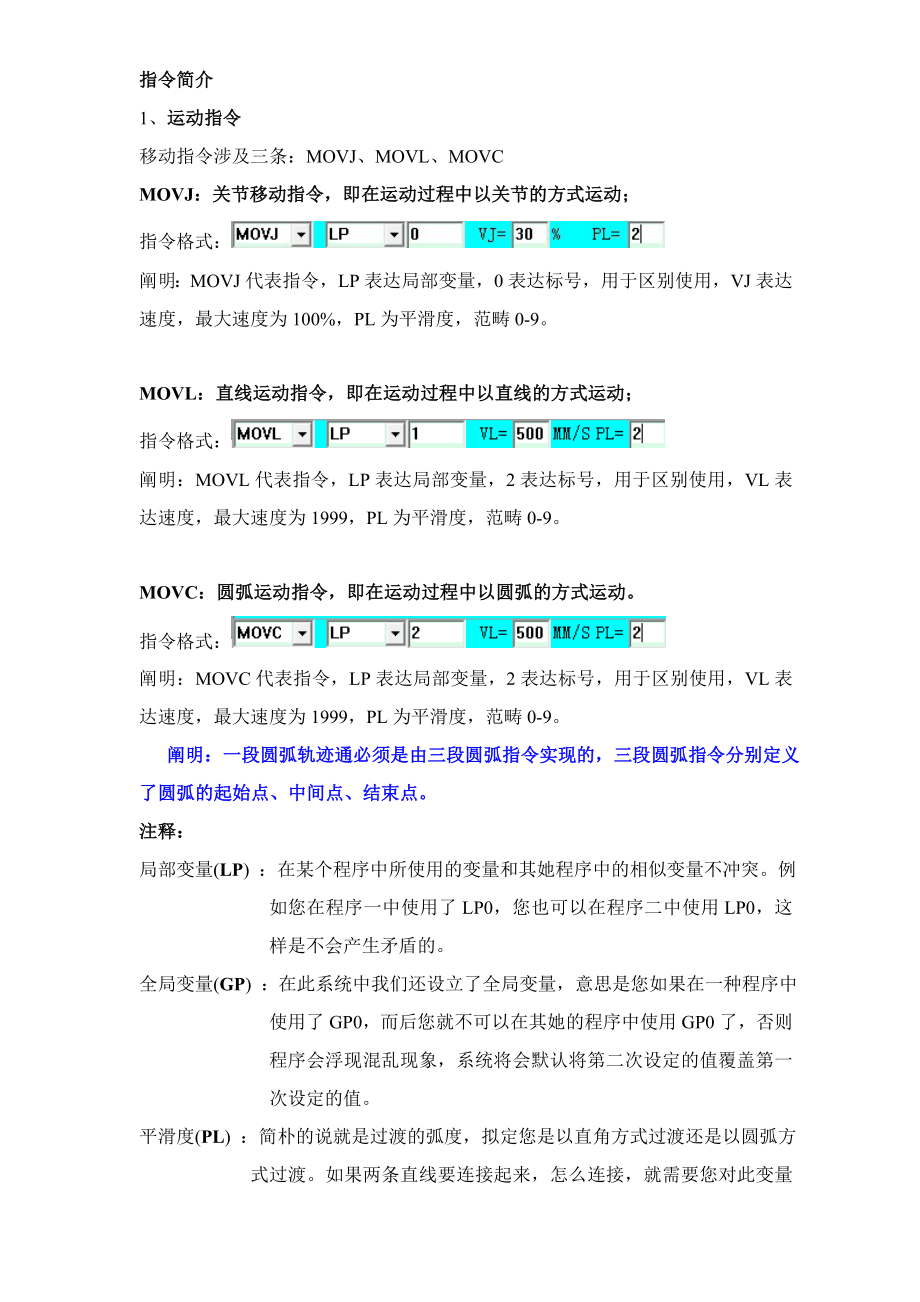
1、指令简介1、运动指令移动指令涉及三条:MOVJ、MOVL、MOVCMOVJ:关节移动指令,即在运动过程中以关节的方式运动;指令格式:阐明:MOVJ代表指令,LP表达局部变量,0表达标号,用于区别使用,VJ表达速度,最大速度为100%,PL为平滑度,范畴0-9。MOVL:直线运动指令,即在运动过程中以直线的方式运动;指令格式:阐明:MOVL代表指令,LP表达局部变量,2表达标号,用于区别使用,VL表达速度,最大速度为1999,PL为平滑度,范畴0-9。MOVC:圆弧运动指令,即在运动过程中以圆弧的方式运动。指令格式:阐明:MOVC代表指令,LP表达局部变量,2表达标号,用于区别使用,VL表达速度
2、,最大速度为1999,PL为平滑度,范畴0-9。 阐明:一段圆弧轨迹通必须是由三段圆弧指令实现的,三段圆弧指令分别定义了圆弧的起始点、中间点、结束点。注释:局部变量(LP) :在某个程序中所使用的变量和其她程序中的相似变量不冲突。例如您在程序一中使用了LP0,您也可以在程序二中使用LP0,这样是不会产生矛盾的。全局变量(GP) :在此系统中我们还设立了全局变量,意思是您如果在一种程序中使用了GP0,而后您就不可以在其她的程序中使用GP0了,否则程序会浮现混乱现象,系统将会默认将第二次设定的值覆盖第一次设定的值。平滑度(PL) :简朴的说就是过渡的弧度,拟定您是以直角方式过渡还是以圆弧方式过渡。
3、如果两条直线要连接起来,怎么连接,就需要您对此变量进行设立。1、 逻辑指令WAIT指令:条件等待指令。指令格式:当您所设定的条件满足时,则程序往下执行;当您所设定的条件不满足时,则程序始终停在这里,懂得满足您所设定的条件为止。但是,背面尚有一种时间的设定,当条件不满足时,在等待背面的设定期间之后,会继续执行下面的程序。JUMP指令:条件跳转指令,涉及无条件跳转指令和条件跳转指令两种类型。格式一:无条件跳转指令格式二:条件跳转指令阐明:在使用此条指令时,要配合使用标号指令。标号就是您所要将程序跳转到的位置,背面不加条件,只要程序执行到此行,则直接跳到标号所处的位置;背面有条件,当程序执行到该行指
4、令时,程序不一定跳转,只有当背面的条件满足时,程序才跳转到标号所处的位置。CALL指令:子程序调用指令,包具有条件跳转和无条件跳转两种类型。格式一:无条件调用指令格式二:无条件调用指令子程序的建立: 子程序的建立和主程序的建立唯一的区别就是在编写完所有的程序之后,在程序的末尾加上RET指令。阐明:1、%就是您所要调用的程序。背面不加条件,只要程序执行到此行,则直接调用该子程序;背面有条件,当程序执行到该行时,程序不一定调用该子程序,只有当背面的条件满足时,程序才调用该子程序。2、在使用call无条件指令时,我们在机器人内部设有固定的子程序调用,用来控制滑台及喷枪(例:自转90度、一枪启动等)。
5、TIME指令:延时指令,以10ms为单位。指令格式:例:延时10秒钟DOUT指令:数字量输出。指令格式:阐明:数字量只有两种形式,因此在使用该指令时只有两种状态,即“ON”和“OFF”两种状态。AOUT指令:模拟量输出。指令格式:例:使A0#0的输出为2.500 PAUSE指令:停止指令,无条件停止指令。格式一:无条件停止格式二:有条件停止阐明:PAUSE指令后就是您所要调用的程序。背面不加条件,只要程序执行到此行,则程序立即停止;背面有条件,当程序执行到该行时,程序不一定停止,只有当背面的条件满足时,程序才停止。;指令:注释指令,解释阐明。指令格式:阐明: 背面的空格部分就是解释的内容,在执
6、行程序时,此部分的内容不执行,相称于提示使用者这里是什么意思,重要以便读者更加轻松的理解该程序。*指令:标号指令。指令格式:注: 配合JUMP指令一起使用。例:使程序跳转到Lable处2、 运算指令ADD指令:加法运算指令。指令格式:阐明:执行加法指令时,将前一种变量和后一种变量相加,可以进行加法的指令有:GI、LI、GD、LD、GP、LP、TC、CC指令。SUB指令:减法运算指令。指令格式:阐明:执行减法指令时,将前一种变量和后一种变量相减,可以进行减法的指令有:GI、LI、GD、LD、GP、LP、TC、CC指令。MUL指令:乘法运算指令。指令格式:阐明:执行乘法指令时,将前一种变量和后一种
7、变量相乘,可以进行的乘法指令有:GI、LI、GD、LD、GP、LP、TC、CC指令。DIV指令:除法运算指令。指令格式:阐明:执行除法指令时,将前一种变量除后来一种变量,可以进行的除法指令有:GI、LI、GD、LD、GP、LP、TC、CC指令。INC指令:加1运算指令。指令格式:阐明:执行加1指令时,将指令后的变量进行加1,可以进行的加1指令有:GI、LI、GD、LD、GP、LP、TC、CC指令。DEC指令:减1运算指令。指令格式:阐明:执行减1指令时,将指令后的变量进行减1,可以进行的加法指令有:GI、LI、GD、LD、GP、LP、TC、CC指令。SET指令:置位指令。指令格式:阐明:执行设
8、立指令时,将后一种变量的值赋给前一种变量,可以进行的加法指令有:GI、LI、GD、LD、GP、LP、TC、CC指令。4、IF指令:条件判断指令。a、 IFEND IF指令指令格式:阐明:判断条件里面的内容与否满足,若条件满足,则执行下面的程序;若条件不满足,则程序不执行IF-END IF所涉及的内容。若您有多种条件进行判断,您可以采用IFELSE IFELSEEND IF。例:如果满足条件X0=ON,就执行TC#(0)加1,若满足条件X0=OFF,就执行TC#(0)减1,若两个条件都不满足,则将TC#(0)里面的值自加。程序如下: IF X0 = = ON INC TC#(0) ELSE IF
9、 X0 = = OFF DEC TC#(0) ELSE ADD TC#(0) TC#(0) END IF5、WHILE指令:循环指令。指令格式:条件开始 条件结束阐明:当WHILE后的条件满足规定期,即条件为ON时,执行WHILE里面的程序,直到WHILE条件后的指令不满足规定,则退出该循环。例:当TC#(1)=20时,执行WHILE里面的程序。(TC#(1)的初始值为50)程序如下: SET TC#(1) 50.000 WHILE TC#(1)=20DEC TC#(1) 程序循环体 DEC TC#(1) END WHILE 在循环体中,一定要对TC#(1)进行设立,否则,该程序将会成为死程序
10、,即程序始终在这个地方执行。6、SWITCH指令:条件选择指令。指令格式: 例:SWITCHEND SWITCH指令的应用SWITCH TC#(2)CASE 10:AOUT AO#(0)=1.000CASE 20:AOUT AO#(0)=2.000CASE 30:AOUT AO#(0)=3.000CASE 40:AOUT AO#(0)=4.000CASE 50:AOUT AO#(0)=5.000CASE 60:AOUT AO#(0)=6.000CASE 70:AOUT AO#(0)=7.000CASE 80:AOUT AO#(0)=8.000CASE 90:AOUT AO#(0)=9.000D
11、EFAULT:AOUT AO#(0)=10.000END SWITCH阐明:当TC#(2)=10时,AOUT AO#(0)=1.000;当TC#(2)=20时,AOUT AO#(0)=2.000;当TC#(2)=30时,AOUT AO#(0)=3.000;当TC#(2)=40时,AOUT AO#(0)=4.000;当TC#(2)=50时,AOUT AO#(0)=5.000;当TC#(2)=60时,AOUT AO#(0)=6.000;当TC#(2)=70时,AOUT AO#(0)=7.000;当TC#(2)=80时,AOUT AO#(0)=8.000;当TC#(2)=90时,AOUT AO#(0
12、)=9.000;其她状况下,AOUT AO#(0)=10.000。应用举例:程序编辑将模式选择开关打到左边,在示教模式下。在进行程序编辑保证已经完毕零位校准。警告:保证自己与机器人有足够的安全距离和开阔的活动空间。一、文献名的建立1、在主画面;2、按下屏幕中的“新建”按钮,则会弹出一种对话框,提示您要输入的文献名,文献名涉及英文字母和数字键,不可输入非法字符(例:、;、“、”等)。在建立文献名的时候您也可以给文献命名为中文名字。一般文献名的输入方式:(1)、直接输入您所需的英文字母和数字键;(2)、输入完毕后按下屏幕上的“”按钮即可。二、程序编辑1、在主界面下,按“”“”将光标移动到新建的文献
13、名上面,如下图。 2、在上图按“打开”按钮,进行程序编辑界面,如下图。 轨迹示意图 阐明:A点以关节运营方式建立起始点,A-B点以关节运动,B-C点走直线轨迹,C-D-E点走出圆弧轨迹,E-F点点走直线轨迹,F-G点以关节运动。表达在关节坐标,表达在直角坐标。表达:在运动过程中以直线的方式运动;表达:在运动过程中直线运动方式的速度为10mm,角度运动方式为1度;表达:在运动过程中直线运动方式的速度为1mm,角度运动方式为0.1度;表达:在运动过程中直线运动方式的速度为0.1mm,角度运动方式为0.01度。主画面中的按钮,通过调节左右按钮,可以对速度进行变化;3、按轨迹图进行编程 a)、按住安全
14、开关,切换机器人不同坐标系(关节坐标、直角坐标)和运营速度的运营方式,走到A点,按“”键,按“”“”将光标选中MOVJ指令,并按“”“”键输入有关参数(P变量可不输入,VJ速度和PL平滑值必须输入)。 输入完毕,按键该指令输入完毕。注意:必须按住安全开关。b)、走到B点,按“”键,按“”“”将光标选中MOVJ指令,并按“”“”键输入有关参数(P变量可不输入,VJ速度和PL平滑值必须输入)。输入完毕,按键该指令输入完毕。c)、走到C点,按“”键,按“”“”将光标选中MOVL指令,并按“”“”键输入有关参数(P变量可不输入,VL速度和PL平滑值必须输入)。输入完毕,按键该指令输入完毕。 d)、在C
15、点原地不动按“”键,按“”“”将光标选中MOVC指令,并按“”“”键输入有关参数(P变量可不输入,VL速度和PL平滑值必须输入)。输入完毕,按键该指令输入完毕,在些建立了圆弧的起点。 走到D点按“”键,按“”“”将光标选中MOVC指令,并按“”“”键输入有关参数(P变量可不输入,VL速度和PL平滑值必须输入)。输入完毕,按键该指令输入完毕,在些建立了圆弧的中间点。 走到E点按“”键,按“”“”将光标选中MOVC指令,并按“”“”键输入有关参数(P变量可不输入,VL速度和PL平滑值必须输入)。输入完毕,按键该指令输入完毕,在些建立了圆弧的结束点。 阐明:一段圆弧必须由三条圆弧指令完毕,分别建立其
16、起始点、中间点、结束点;在三段圆弧中输入VL和PL参数时其值一般应当为同样的。f)、走到F点,按“”键,按“”“”将光标选中MOVL指令,并按“”“”键输入有关参数(P变量可不输入,VL速度和PL平滑值必须输入)。输入完毕,按键该指令输入完毕。g)、走到G点,按“”键,按“”“”将光标选中MOVJ指令,并按“”“”键输入有关参数(P变量可不输入,VJ速度和PL平滑值必须输入)。输入完毕,按键该指令输入完毕。 4、保存程序 程序编辑完毕后,按界面下的键,保存目前程序。到该步程序编辑完毕,为保证程序对的,以防发生事故,一般需要对程序进行试运营。三、程序试运营 警告:试运营前必须保证机器人运动范畴内
17、没有操作人员,保证自己与机器人有足够的安全距离和开阔的活动空间。 1)、在主面界面右侧调节运营速度,一般建议不不小于50%以保证安全。如下过程中,必须密切注视机器人运动,若发现异常,立即松开键和安全开关。 2)、按下安全开关,将光标移动届时第一行。 3)、始终按下键,直到走到A点。 4)、光标移动届时第一行,始终按下键,直到走到B点 5)、按上述环节运营到最后一行。保证程序运营正常。四、程序自动运营 警告:自动运营前必须保证机器人运动范畴内没有操作人员,保证自己与机器人有足够的安全距离和开阔的活动空间。1)在程序界面,将模式选择开关打到中间位置,系统界面左下角提示“自动模式”。 2)在系统界面右侧选择运营速度,的运营方式。 第一次运营时速度尽量放低,方式最佳选择单段。 3)按键,启动程序。 自动运营过程程中,必须密切注视机器人运动,若发现异常,立即按下急停按钮。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
