《PWM控制直流电机(重要资料)》由会员分享,可在线阅读,更多相关《PWM控制直流电机(重要资料)(7页珍藏版)》请在装配图网上搜索。
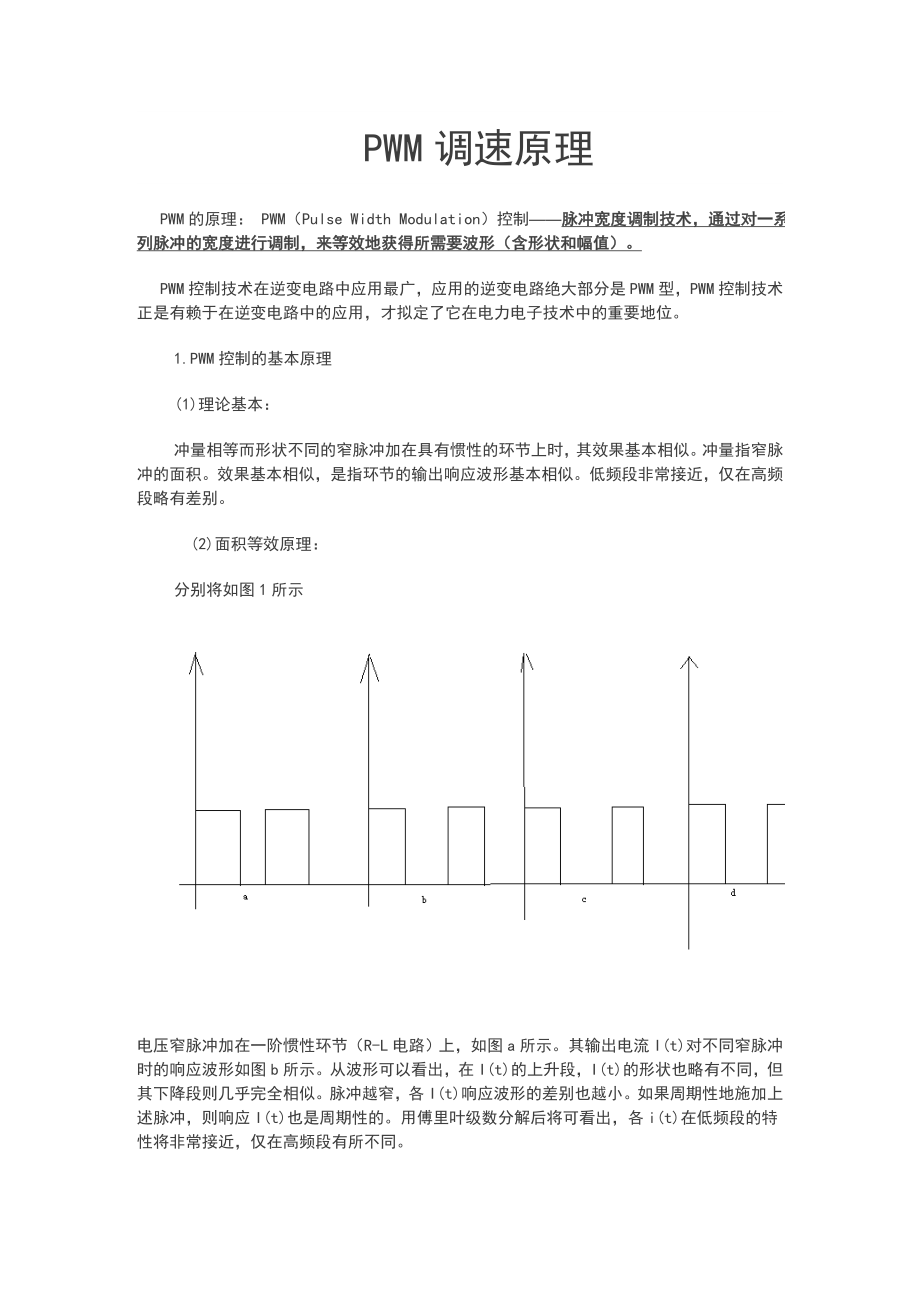
1、PWM调速原理PWM的原理: PWM(Pulse Width Modulation)控制脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。 PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM控制技术正是有赖于在逆变电路中的应用,才拟定了它在电力电子技术中的重要地位。 1.PWM控制的基本原理 (1)理论基本: 冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相似。冲量指窄脉冲的面积。效果基本相似,是指环节的输出响应波形基本相似。低频段非常接近,仅在高频段略有差别。 (2)面积等效原理: 分别将如图1所示电压窄脉冲加在
2、一阶惯性环节(R-L电路)上,如图a所示。其输出电流I(t)对不同窄脉冲时的响应波形如图b所示。从波形可以看出,在I(t)的上升段,I(t)的形状也略有不同,但其下降段则几乎完全相似。脉冲越窄,各I(t)响应波形的差别也越小。如果周期性地施加上述脉冲,则响应I(t)也是周期性的。用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。图2 冲量相似的多种窄脉冲的响应波形用一系列等幅不等宽的脉冲来替代一种正弦半波,正弦半波N等分,当作N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲替代,等幅,不等宽,中点重叠,面积(冲量)相等,宽度按正弦规律变化。 SPWM波形脉
3、冲宽度按正弦规律变化而和正弦波等效的PWM波形。图3 用PWM波替代正弦半波要变化等效输出正弦波幅值,按同一比例变化各脉冲宽度即可。 PWM电流波: 电流型逆变电路进行PWM控制,得到的就是PWM电流波。 PWM波形可等效的多种波形: 直流斩波电路:等效直流波形 SPWM波:等效正弦波形,还可以等效成其她所需波形,如等效所需非正弦交流波形等,其基本原理和SPWM控制相似,也基于等效面积原理。2. PWM有关概念占空比:就是输出的PWM中,高电平保持的时间 与 该PWM的时钟周期的时间 之比如,一种PWM的频率是1000Hz,那么它的时钟周期就是1ms,就是1000us,如果高电平浮现的时间是2
4、00us,那么低电平的时间肯定是800us,那么占空比就是200:1000,也就是说PWM的占空比就是1:5。辨别率也就是占空比最小能达到多少,如8位的PWM,理论的辨别率就是1:255(单斜率), 16位的的PWM理论就是1:65535(单斜率)。频率就是这样的,如16位的PWM,它的辨别率达到了1:65535,要达到这个辨别率,T/C就必须从0计数到65535才干达到,如果计数从0计到80之后又从0开始计到80.,那么它的辨别率最小就是1:80了,但是,它也快了,也就是说PWM的输出频率高了。双斜率 / 单斜率假设一种PWM从0计数到80,之后又从0计数到80. 这个就是单斜率。假设一种P
5、WM从0计数到80,之后是从80计数到0. 这个就是双斜率。可见,双斜率的计数时间多了一倍,因此输出的PWM频率就慢了一半,但是辨别率却是1:(80+80) 1:160,就是提高了一倍。假设PWM是单斜率,设定最高计数是80,我们再设定一种比较值是10,那么T/C从0计数到10时(这时计数器还是始终往上计数,直到计数到设定值80),单片机就会根据你的设定,控制某个IO口在这个时候是输出1还是输出0还是端口取反,这样,就是PWM的最基本的原理了。PWM调速原理在数控机床的直流伺服系统中,速度调节重要通过变化电枢电压的大小来实现.常常采用晶闸管相控整流调速或大功率晶体管脉宽调制调速两种措施,后者简
6、称PWM,常用于中小功率系统,它采用脉冲宽度调制技术,其工作原理是:通过变化接通脉冲的宽度,使直流电机电枢上的电压的占空比变化,从而变化电枢电压的平均值,控制电机的转速.PWM调速系统具有如下特点:1.主电路简朴,所用功率元件少,且工作于开关状态,因此电路的导通损耗小,装置效率比较高;2.开关频率高,可避开机床的共振区,工作平稳;3.采用功率较小的低惯量电机时,具有高的定位速度和精度;4.低速性能好,稳速精度高,调速范畴宽;5.系统频带宽,动态响应好,抗干扰能力强.常用的PWM驱动系统的主电路(功率放大器)构造有:H型和T型,下面简介双极式H型PWM驱动的电路工作原理.图1-2-2-1图1-2
7、-2-1中,VD1,VD2,VD3,VD4为续流二极管,用来保护VT1,VT2,VT3,VT4三极管,图中Ub1=Ub4=-Ub2=-Ub3.当Ub1=Ub4为正时,VT1 和VT4导通, VT2和 VT3截止,UAB的电压=US;当Ub2=Ub3为正时, VT1和 VT4截止,但VT2 和VT3不能立即导通,由于电机的反电势使AB存在续流,续流流经VD3和VD2,保护了四个三极管,若续流在这个过程没有得到很大衰减,而Ub1=Ub4为正的阶段已经来临,则VT2 和VT3没有导通的时候;若续流在这个过程得到很大衰减,则VT2 和VT3导通,UAB的电压=-US.显然,Ub1=Ub4为正的时间和U
8、b2=Ub3为正的时间相似时, UAB的平均值=0,电机动态静止;Ub1=Ub4为正的时间长于Ub2=Ub3为正的时间时, UAB的平均值0,电机正转UAB的值越大,转速越高;Ub1=Ub4为正的时间短于Ub2=Ub3为正的时间时, UAB的平均值0,电机反转,UAB的值越小,转速越高.可见,只要控制Ub1,Ub4,Ub2,Ub3的脉冲宽度,就可控制电机的转向和速度,且可以达到动态静止,有助于正反转死区的消除PWM 直流电机调速程序参照/*/* L298驱动直流电机 PWM调速,控制正反转 */*/#include / 头文献#include / 头文献#define uchar unsign
9、ed char #define uint unsigned int sbit enA=P12; / A相始能端sbit in1=P11; /sbit in2=P10; / 输入端char zkb=-100; / 设立占空比,范畴在(-100100)占空比的绝对值越大,速度越大uchar t=0; / 中断计数器uchar dianji=0; / 电机速度值 uchar SPACH; / 电机目前速度值 /*/* 正反转控制 */*/void motor(char speed) if(speed0) / 不为负数则正转 in1=0; in2=1; if(speed0;j-); /* 主函数 */
10、void main() TMOD=0x02; /设定T0的工作模式为工作方式2 TH0=0x9B; /装入定期器的初值TL0=0x9B; EA=1; /开中断 ET0=1; / 定期器0容许中断 TR0=1; /启动定期器0 while(1) motor(zkb); / delay(1000); /延时 /* 中断服务子函数 *Void timer0() interrupt 1 /T0中断服务程序 if(t=0) /1个PWM周期完毕后才会接受新数值 SPACH=dianji; if(tSPACH)enA=0; /产生电机1的PWM信号 t+; if(t=100) t=0; /1个PWM信号由100次中断产生
 PWM控制直流电机(重要资料)
PWM控制直流电机(重要资料)