 三维激光扫描仪工作流程
三维激光扫描仪工作流程

《三维激光扫描仪工作流程》由会员分享,可在线阅读,更多相关《三维激光扫描仪工作流程(12页珍藏版)》请在装配图网上搜索。
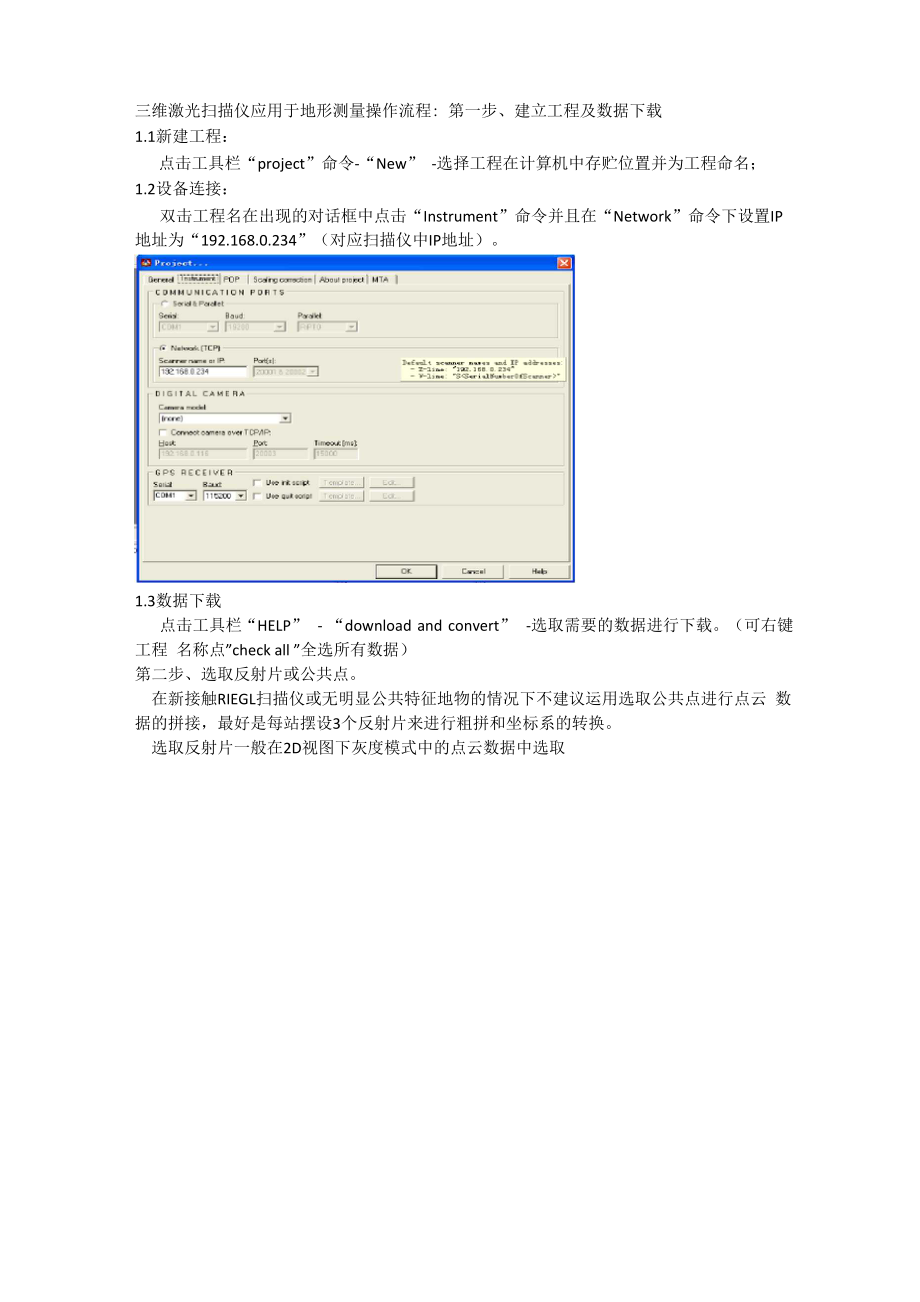
1、三维激光扫描仪应用于地形测量操作流程: 第一步、建立工程及数据下载1.1新建工程:点击工具栏“project”命令-“New” -选择工程在计算机中存贮位置并为工程命名;1.2设备连接:双击工程名在出现的对话框中点击“Instrument”命令并且在“Network”命令下设置IP 地址为“192.168.0.234”(对应扫描仪中IP地址)。1.3数据下载点击工具栏“HELP” - “download and convert” -选取需要的数据进行下载。(可右键工程 名称点”check all ”全选所有数据)第二步、选取反射片或公共点。在新接触RIEGL扫描仪或无明显公共特征地物的情况下不
2、建议运用选取公共点进行点云 数据的拼接,最好是每站摆设3个反射片来进行粗拼和坐标系的转换。选取反射片一般在2D视图下灰度模式中的点云数据中选取在反射片的中心点击右键,选择“create tiepoint here”输入点名称(点名称应便于记住并 且与选取的公共点区分开)在2D视图中选取反射片后,可在3D视图中拖入标记的反射片来检查标记的反射片位置是 否正确,若发现反射片偏离,可在TPL中删除改点,在3D视图中重新选择。第三步、导入外业实测反射片坐标(反射片坐标是用RTK测得)把外业RTK点(TXT格式或者CSV格式)导入TPL(GLCS)需要注意X6位Y7位;fat- Itiiri fe-lr
3、fcIdil TL-o-lnUlik TiftfEfidM, 71 ibvllwi,hl sjo-IMc TbbL IhflTirshl n IHiuki TbI *土-苗 s1 j o 填 山*咨幽勺占 am3 * + 口t *. . :,:. | # 孑-: p a a ; * z 沱 f a# - a a -|2T d rT s fl疝i园霜* | :皂 ,丁择|其挡F鸣WL .导肾EjaE用iSCAN= qiiiiiMRECAN PFij I 7.F: F呼Ct end;U 13434-22, maMW 2013044Oxmri 加简翩同Eflin g 11B.7 Jc附丽 WW混,初
4、Z1I2IB14A17i tispwrlBdfrlMCk Ts?prjnilip|im(iiTri 技E寻小Tl 44*1nii it Ti4finl|c TitfL Hfliruraci n FirrSia Til T1 做声t 咐d冬淄 iff j o 原*鸟 D 里 a m 5 * *T *. - |:j ; A I P A A ;,.、“ F ? I O - x a a U # - A A - i固,ir写部禅反亏i阳霜虫ii 浏 ,下择丑ii已挡F H rfc*MWrfcn,w MSN- i * 财就皿 J. T.?SEgE&Jh!e Kill i rl-fw Tisc T.fifs
5、frlni ri sa由i1 咋痴is tisjHMY Tbbl 映fkEirmi&v IHrr Tilt Tiff j o 辱毒 41 倒 u 乏 sms *e a*丽H.KkUlPHESlI,/ iLfiPAimg* 白 COLLBTDONE O BCAMS.-oMEwS写苛Mhjfl巾5-曰 OBJECTSIFLlFRCOTOLFRCElA WSTPLlGLCI tilWiti-TUffrihkH-D.UODDDnDflDD ZK -11111111 1Y心 wDaalmDaDammDaalmm s QQQQQQQnQQQafB4? 嵋诚 汕 EE 4G4BO 汹 33 4E4B5 04
6、33 如觅 M3a 州 6U3E6 拒阳I 理派 ifiiai 顼3S 491603*0 折巧3FWm-t渚里筠|口旗 v I &匚。|i a - -IhfITTioIz-. rr x,占*虾. eJNi:ui fat- Itiiri hlt-IrJE-AI7i 叩曲mi0 T is pniriijr5l import 眈icrtM8 Tis pci liinrl import11厦 福 Hi impiDfl; iilSlifiJF 珂由:命村 口 & iELdPrEssct FPrajflcn.FliSCir& 荷 EM如果我们是用选取公共点进行站站之间的粗拼,或用反射片进行粗拼,可以在TP
7、L(GLCS) 中选取所有点右键,复制到TPL(PRCS)。注意:一般我们在野外作业时都是用磁罗盘进行定向配合GPS进行数据扫描,内业一般 就可以不用进行粗拼,第四步可以跳过,所以我们不用将TPL(GLCS)中的点复制到TPL(PRCS) 中。第四步、粗拼粗拼就是将站站之间的位置在一定的误差范围内重合。粗拼有三种方法一、在野外作业时都是用磁罗盘进行定向配合GPS进行数据扫描,相对位置不会发生 太大的变化,我们可以理解为已经粗拼完成。某些个别站因为各种原因可能会发生相 对位置变化很大的情况,我们可以通过改变某站扫描数据的X、Y、Z坐标进行粗拼。 例:假设第一站()的点云数据相对位置正确,我们将第
8、二站()的点云数据与 的点云数据进行粗略拼接。步骤为将的点云数据放到一个视图窗口上,调整至较为清晰的公共部分在右边的视图框中选中第二站的点云数据,右键选择“ modify orientation & position 命令二、通过扫描仪中反射片坐标TPL(socs)与RTK所测坐标进行点与点匹配进行粗拼将RTK所测的TPL(GLCS)在每站的TPL里面选择TPL(GLCS)寻找“同名点”(和导入 的控制点匹配)点到点,设置正确的容差和匹配点个数,如果无法匹配的时候首先检 查容差设置和匹配点数量的设置,如果还不行打开3D点云看选取的位置是否在所要 选取的位置上。如果在这一站里没有找到这三个反射片
9、可以通过手选3个公共点与有公共部分的站进行匹 配三、手动拼接在相关两站点云中分别选择至少三对同名点,通过每一站的TPL (SOCS)中的“寻 找同名点功能”与其他站进行拼接。用此拼接方法时需注意设定一站为基础站,其他站一次往这站上拼,每进行一次粗 拼,就要马上做一次精拼(例如scanpos001为基准站,首先在scanpos001和scanpos002 的点云中选取至少三对同名点,然后在scanpos002的TPL中点击寻找同名点,勾选 scanpos001站进行粗拼,之后马上对这两站进行精拼,然后在选取scanpos003与 scanpos002的同名点进行粗拼)。注意:手动拼接的方法可与之
10、前两种粗拼方法混用,而粗拼方法一和二不得一起使用。第五步精拼(多站点拼接)5.1准备数据在工具栏拼接命令下进行创建用于拼接的基础数据,设置参数(如果是做地形max planeerror=0.02m (建筑的话为 0.015)、maxedge lenth=2m (建筑的话为 1)、reference range=设 置 站 站 重叠 长 度 或 测 程 的一半)CrFJri ncv pfilyd.Q Cce-ite1 iww 即lydm|喝EIUFUT &ATA$1 LECTIDH UQDE广 boNisw很 TnWvwFILTER MODEM X ScgrfDI三 3 勇HGLESC短S U
11、硕心1冲K以PO血TAE G.brorfD2I e JI 郭i$LE汐M05 1401W_1j226 昌POLATi E . SwP谶3_3回再 14OIK?_1I*J34 号 POLATA E jfc BPW04h. -3 5IH5l5WI5 5 1401 E?.1 展19区E HUlLff.lifcia .且 POL仰ATAh. bEWXB9 3州GUE拙眦05 i 4J:d C-718:l 51 iiWiE1H 一 岂 POLY&aTa c *msw 砒 e4. 10&. &njssp-litudji Et.O 1.0 RClCLncc-417.66 - tS2 7.7j DAirikt
12、lan q #TJ ChEiiaps.sfi EAACrCalar waiO TEi*nguJ*-E wlrJi lJL-dTDnnpliEOpoieie :llr (Scip 1 S)DZeha 11e.e; pi.sm pjEefe. :84Xe.e同*11|倾虬Tgi最大边长PLANS AFACE FM*t pi* *io |mt 回gHoc cdg?Kp4r4PlAfU ILL: fXYFL|PRC$| _Jgitdirtohikn mJpl最大的平面误差nw最小范IS JM*r h分割角度NNde: Il k reccmmeKied 炉 use the newi Rane 澜曲 11
13、 矿 叫&1 4 lilts one.ADDHIONAL SETTINGS蛔 get fWQ MBr Sim ReHett-ance- as AnpMijde fshow del日MHe:Ths bdler is 岫 us,Fat dafla pncessng!.CWKiJffptarl5.2精拼打开多站点拼接命令,锁定基础站,如果多站已拼接好需将拼好站锁定(拼好一站锁一 站),在拼接过程中一定要一站一站拼需要设置的参数(设置搜索半径,半径大小根据粗拼的结果来定;设置误差递减,幅度 不要太大;)根据计算的结果重复设置更小参数直至达到最优结果;检查点云数据,看无明 显分层即可。第六步坐标转换若米
14、用每站三个反射片粗拼的方法(即粗拼方法二),首先需要删除TPL(prcs)里的所有 点,之后将每一站TPL (socs)中的点复制到TPL (pres),打开TPL (prcs)进行点对点匹配 (坐标转换)。若没有才用三个反射片粗拼的方法,可直接将每一站TPL(socs)中的点复制到TP(prcs), 打开TPL (prcs)进行点对点匹配(坐标转换)。第七步数据分块对于较大区域的测图,由于GPS误差、拼接误差等多方面因素的影响,外业所采集的 控制点在坐标转换过程中不可能完全应用,为了提高精度我们需要将数据分为几块,保证每 一块内采集的所有控制点都能在满足精度要求的情况下使用。第八步数据合并和
15、抽希在OBJECTS里面的POLYDATA中右键新建一个POLYDATA文件,然后再出现的对话框中 选择所要合并的文件,并在设置中点击octree命令在increment栏中确定抽希的间隔距离, 勾选Conbine命令合并选择的数据。上图为0.8平方的矿坑采集的点云数据.上图为左边为数据抽希后的数据右边为没有抽希的点云数据。第九步剔除植被打开合并好的数据,通过正视图、侧视图等删除躁点;部分选取数据,点击terrian filter 按钮,选择工程坐标系(GLCS)设置vegetation剔除植被、mining-object剔除矿上上的物体、 mining-points below terrai
16、n为剔除低于地面的点。在运行剔除植被之后,所有被计算机认为 是植被的点将处于选择状态,在这当中通常会有一些坡坎点,我们需要手动的将这些有用的 点进行保留,进入选择状态,选择空五角星图标,手动选择需要保留的点。对点云进行检查把不参与生成等高线的点(噪点、植被、房屋等)手动框选删除。第十步选取地物点为了在CAD中描图更加明显,我们通常选取原始点云中的地物进行绘制,打开有地物 点的原始点云数据,手动选择地物部分,用复制命令将这些点创建为一个新的polydata。第一步导出点云数据在polydata中选取处理好的数据点击右键选取export命令-选择保存类型1、选择ascii格式导出ID X Y Z,
17、加一列逗号当高程点导入CAD ;皿辨旬乳皿.bd -a交倒日辐亩:日但:(讶剧段卜)们力护芯.口花,4如弗K. /&-:!花.*51blbbtl.皿 4冷止龙.7 JL.lJYb.驱&Z E1能版一彼丈4奕止瓶一冥Z技M-关1:,blbt-b-b.、斗拘 1 如匕 4说,H罚.%&L时成&E二4霓姑立M21,技14遂&b, blbb-M. U卯,4时lb驾.4亚,HN.门U 奴51655.蹈L 4匏止变一 4艾_工1 一 3Ci h 洪成.匕生拘比书.汩匕技1 .义9为口能长一祝 4霓1弟一 2公技烈-4789, bl*说.如匕4加比处.N我,二皿.克J1。上165E.1巨房安土交S.绍S,
18、LI?翌.关r1:上l&b怵.沉& 鼎:加.住土 处12.51f.Sf3.717,套心 LI?富.就013. E165e5.3E7, 4E41553. 5方,LEWI,组514, 由浴料.用1,茹妃花4.花1, LC21.E331E.E1GKE.3E2, 4E41d35. LET, LC20.5D1KE1&的一饥,454153. LTCL LMl.安717.16566.156, 4E415S4. 319, LC20.774Ig.El&NE一筌M 套匕史4一 3E4, LC2L.W19.E1G56E.373, 4E41534.名,LC22.154如上1沾敖一及曳 套匕5昊一皿 L.商21, E1
19、65EE.的K 4H1534. LC22. E*22, E1浴饪一技W,耍虻爻4一 3C3. LC23.日1。3,E1施於.如二姿433虬 环 LC21.45?4上比5饪一花瓦 安虻交R 7 LC21.78?康 E1 海.g 4E4:元L 孤N LC21.L35M.E1R京RMCM驻虹交4折& LC笑.仔如27. E16564. 752, 4E41534. 3C9, LC22. E3423, 电烬性.花匕2机3巽.3井,LC23.如29. El&KE. 86, 4E41534.花6, LC23.姓景.可麻也一迎 套如一无J LC13.221131. E1&571.210, 4H15E&. 4路
20、 LE14.E%32. 1571.276,关匕日由一LC15.C5433E1&571.CE,我虻部.ISO, LC14.7S7题上1麻71 一弟&安网一 3S, L口5.矣B35上1 能也能& 4H1527. 3E(S, LC15.疝3ft. Elf.571.277,其虹丈7一 芟9, L口 E.E叫3751&571.30, 4H152&. 7, LC15.35L源上 16571.花L 4S41523. 2C2t LC15上约叫 E1G册3.芒& 4E4:W4.买3. LC13,顷2,选择地物导出DXF格式可以作为底图加载进CAD进行画草图。到此就可以把dat数据导入cass进行画图了。(三维
21、激光扫描仪自带单方相机取景画图遇到 不清楚的地物可以提取照片作为参考)。其他基本功能及操作一、点云附色在原始点云数据上点击右键,选择color from image,本站拍摄的照片将会附到点云数 据上,之后通过在视图中选却ture color 一项查看彩色点云数据。二、生成DEM模型打开剔除植被、地物点的点云数据(polydata),在右边窗口中选择全球坐标系,点击俯视图, 在视图中右键,“选择 选择所有”,再次点击右键,“Triangulate plane triangulate”, 在弹出对话框中设置参数1、最大三角网边长(根据点云数据漏洞大小设置)2、三角网与 视角的角度(为了获得更多的三角网数据通常设置为90,无限制)3、最小三角形内角(为 了避免生成的三角网过于尖锐,通常需要给定一个最小三角形内角,但是为了生成的三角网少有漏洞,通常设置此值为0) 三、动画制作在VIEW文件夹中新创建一个视图窗口,在视图窗口中右键,选择create new animation, 在视图中拖入需要的点云数据,在视图中旋转角度旋转合适位置后,点击add position添加 一帧,依此类推。添加所有关键帧后,点击recorder命令中的record按钮,开始渲染视频, 此过程很长需耐心等待。以上内容为简要介绍,需详细了解请查看相关视频和中文繁体版操作手册。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
