《2022年数字PID控制在运动控制系统中的应用定义》由会员分享,可在线阅读,更多相关《2022年数字PID控制在运动控制系统中的应用定义(5页珍藏版)》请在装配图网上搜索。
1、第6期2006年12月中国电子科学研究院学报Journal of CAE ITVol.1 No.6Dec.2006工程与应用数字PI D控制在运动控制系统中的应用高彬娜(中国电子科技集团公司第45研究所,河北燕郊 065201)摘 要:在半导体设备运动过程中,有效的调节数字PI D 控制参数可以提高设备运动的稳定性和可靠性,利用积分分离的算法来实现具有最佳组合的PI D控制。关键词:运动控制;数字PID;PI D 控制中图分类号:TN741文献标识码:A 文章编号:1673-5692(2006)06-564-04The appli cations of digital PID control
2、for m otion control syste mG AO Bin2 na(The 45th Research Institute of CETC,Hebei Yanjiao 065201,China)Abstract:In themotion of se miconducting equipment,better digital PI D control para meters can improvestability and reliability of equipment.U sing separateintegral arithmetic can get optimal PI D
3、control.Key words:Motion control;D igital PID;PI D control收稿日期:2006209211修订日期:2006212281 引 言随着半导体后封装设备的飞速发展,数字PI D控制已成为运动控制技术中普遍采用的控制方法,PI D控制即通过对偏差的比例(P),积分(I)和微分(D)的线性组合构成控制量,对被控制对象进行控制。因此,PI D 控制器要取得较好的控制效果,就必须通过调整好比例、积分和微分三种控制作用,形成控制中相互配合相互制约的关系。由于这种关系并不是简单的线性组合,所以要通过有效的调节来实现具有最佳组合的PI D 控制。2 运动控
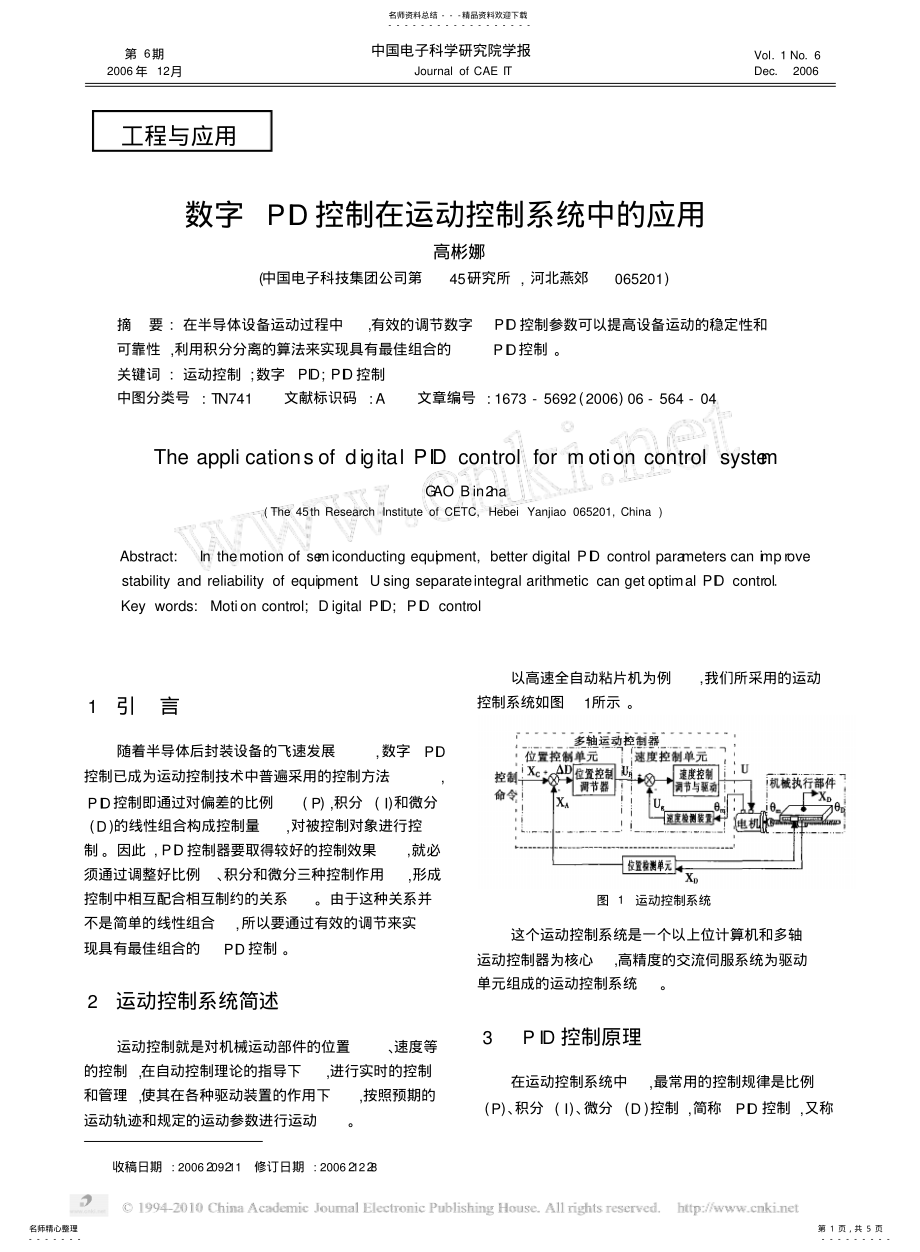
4、制系统简述运动控制就是对机械运动部件的位置、速度等的控制,在自动控制理论的指导下,进行实时的控制和管理,使其在各种驱动装置的作用下,按照预期的运动轨迹和规定的运动参数进行运动。以高速全自动粘片机为例,我们所采用的运动控制系统如图1所示。图1 运动控制系统这个运动控制系统是一个以上位计算机和多轴运动控制器为核心,高精度的交流伺服系统为驱动单元组成的运动控制系统。3P ID控制原理在运动控制系统中,最常用的控制规律是比例(P)、积分(I)、微分(D)控制,简称PI D 控制,又称名师资料总结-精品资料欢迎下载-名师精心整理-第 1 页,共 5 页 -2006年第6期高彬娜:数字PID控制在运动控制
5、系统中的应用565PI D调节。其原理的关键是测量、比较和执行。PI D控制器将受控对象的测量值与设定值相比较,并用这个误差来调节系统的响应。311PID控制原理常规 PI D 控制系统原理框图如图2所示,系统由 PI D 控制器和被控对象组成。图2P ID控制系统PI D控制器是一种线性控制器,它根据给定值r(t)与实际输出值c(t)构成控制偏差e(t)。e(t)=r(t)-c(t)(1)将偏差的比例(P)、积分(I)和微分(D)增益通过线性组合构成控制量,对被控对象进行控制,故称PI D控制器。其控制规律为u(t)=Kp e(t)+1TIt0e(t)dt+TDde(t)dt(2)其传递函数
6、形式为G(s)=U(s)E(s)=Kp(1+1TIS+TDs)(3)式中,KP为比例系数;TI为积分时间常数;TD为微分时间常数。PI D 控制器各校正环节的作用如下。(1)比例环节。及时成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用,以减少偏差。比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅 有比例 控制 时系统 输出 存在 稳态误 差(steady2state error)。(2)积分环节。主要用于消除稳态误差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。在积分控制中,控制器的输出与
7、输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的,或简称有差系统(syste m w ith steady-state error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于0。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。(3)微分环节。能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从
8、而加快系统的动作速度,减小调节时间。在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用变化“超前”,即在误差接近0时,抑制误差的作用就应该是0。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于0,甚至为负值,从而避免了被控
9、量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。312PID控制算法在数字PI D控制系统中,使用比例环节控制输出与输入误差信号成比例改变,但是实际值与给定值通常会存在偏差,这个偏差称作稳态误差。因此,需要引入积分环节的消除稳态误差功能提高精度,但是加入积分校正后,产生积分积累,会产生过大的超调量,甚至在给定值上下振荡,这在电机的运行过程中是不允许的。为了减少在电机运行过程中积分校正对控制系统动态性能的影响,需要在电机的起停阶段或大幅值进给时,采用积分分离PI D 控制算法。偏差值较大时只加比例、微分运算,取消积分校正。而当电机的实际位
10、移与给定目标位移的误差小于一定值时,则恢复积分校正作用,以消除电机系统的稳态误差。利用逻辑运算,可以很方便地确定积分分离PI D 控制的进程,实现电机的积分分离PI D控制,弥补模拟PI D调节控制的不足,改善系统的控制性能,减少超调量,缩短调整时间。在积分分离PI D 控制算法中,我们需要设定积分分离阈值,当|e(k)|时,即偏差值较大时,仅采用PD 控制环节,减少超调量,使系统有较快响名师资料总结-精品资料欢迎下载-名师精心整理-第 2 页,共 5 页 -566中国电子科学研究院学报2006年第6期应;当|e(k)|时,即偏差值比较小时,采用PI D控制,以保证电机运动精度和稳定度。在半导
11、体后封装设备中主要是控制电机完成运动,要求控制系统消除稳态误差,减少超调量提高控制系统的精度,所以积分分离 PID控制算法很适合运动控制系统,采用积分分离 PI D控制后的效果如图 3所示。12 普通PID控制 22 积分分离PID控制图3积分分离PID控制效果由图可见,采用积分分离PI D 控制算法使得运动控制系统的性能有了很大改善。4 数字PID控制器的参数设置PI D 控制器的参数设置是控制系统的核心内容。它是根据运动过程的特性确定PI D 控制器的比例系数、积分时间和微分时间的大小。一般来说PI D参数设置有两种方法:(1)理论计算设置法。它主要是依据系统的数学模型,经过理论计算确定控
12、制器参数。但是所得到的计算数据不能直接用于运动控制中,还必须通过工程实际性能进行调整和修改。(2)工程设置方法。它主要依赖工程经验,直接在控制系统的试验中进行,根据各参数对系统性能的影响程度,边观察系统的运行,边修改参数,直到满意为止。比例、微分和积分是相互影响,相辅相成的。比例控制能迅速反应误差,增大比例系数可以加快系统的响应速度。但是,比例控制不能消除稳态误差,比例放大系数的加大会引起系统的振荡使稳定性变差。积分控制的作用是,只要系统有误差存在,积分控制器就不断地积累、输出控制量以消除误差。因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为0,从而消除稳态误差。积分作用太强会使
13、系统超调加大,甚至使系统出现振荡。微分控制可以减小超调量,克服振荡,使系统的稳定性提高,改善系统的动态性能,但是它会减弱系统的抗干扰能力。所以要通过反复的实验、观察和分析来确定最佳参数组合。在调节过程中可以用示波器来监视运动曲线进行调节,也可以使用运动控制器所带的PI D 专用调节软件进行PI D 调节。下面以高速粘片机的键合头系统为例来说明一下如何在运动控制系统中设置PID参数。(1)首先选择一个适当的运动位置,确定一个采样周期让需要调整的部件运动如图4所示。图4确定适当的运动位置(2)只加入比例控制环节,将积分参数和微分参数设置为0,在没有临界振荡的前提下,适当增加比例系数,提高系统的响应
14、速度,获得阶跃曲线如图5所示。从图 5可以看出,系统存在一定的误差,从放大的图上可看出误差为15 cts,约 15m。(3)适当增加一些积分增益来减小比例所引起的稳态误差,得到改善的阶跃曲线如图6所示。从图 6中可以看出加入积分增益后,误差减小了很多,但是系统产生了一些振荡。(4)接下来增加一些微分增益来减小积分带来的超调和振荡,同时要微调比例和积分参数,直到满意为止,所得曲线如图7所示。图 7的阶跃曲线就是比较理想的,所以只有不断地调整和改善参数,才能得到一个较好的参数搭配,从而提高系统的稳定性和响应速度。(5)调节好参数后,在连续运动过程中应用积分分离PI D控制,得到较好的运动曲线,实际
15、曲线可以很稳定地跟随命令曲线,并且具有很快的响应速度。5结 论实践表明,在运动控制系统中有效地调节PI D参数,使用积分分离PI D 控制算法可以很好地改善系统性能,提高系统的运动控制品质,使设备处于一个良好的运动环境中。名师资料总结-精品资料欢迎下载-名师精心整理-第 3 页,共 5 页 -2006年第6期高彬娜:数字PID控制在运动控制系统中的应用567图5加入比例增益的阶跃曲线图6加入积分增益的阶跃曲线图7加入微分增益的阶跃曲线(下转第579页)名师资料总结-精品资料欢迎下载-名师精心整理-第 4 页,共 5 页 -2006年第6期孙志君:迈向市场的半导体LED与市场前景579继续提高这
16、种LED 的发光效率,适当地对这种器件热的产生加以控制,使其工作温度保持在规定的范围内,是使这种新型照明灯泡获得最佳性能的关键。目前这种大功率半导体LED 光源技术还处在逐步取代现在普遍使用的真空型白炽灯泡阶段,但是由于对许多通用应用领域和特殊的应用领域具有极大的吸引力,随着这种技术的快速发展,将渗透到发光应用的各个领域,展现在人们面前的将是一个光辉灿烂的光世界。参考文献:1Jeff Tsao,et all.Se m iconducter L ight SourcesMove from theIR to the V isible and UV J.Photonics Spectra,2005,
17、1:51-52.2LED sContinueto Advance,Photonics Spectra,2005,1:60-62.3New technology Moves LED s into Consumer App lications,Photonics Spectra,2005,1:80-81.4电子工程专辑 G.2005,4.5Photonics Spectra,2006,1:86-93.(上接第572页)同时由于P ON固有的原理与特点,使得它能运用于很多点到多点的通信系统,全国的FTTH龙头企业武汉烽火最近也推出了基于GEPON的监控通信系统设备,随着各个方面条件的成熟,P ON
18、技术的应用将更加广泛。参考文献:1 陈雪.无源光网络技术M.北京:北京邮电大学出版社,2005.2原 荣.宽 带 光 接 入 网M.北 京:电 子 工 业 出 版 社,2003.3 孙强,周虚.光接入网技术及其应用M.北京:清华大学出版社,2005.4张博,刘云.P ON在高速公路紧急电话系统中的运用 J.电信工程技术与标准化.2006,5.5David Cleary Ph D.Fundamentals of a Passive Op tical Net2work(P ON).Fiber Powered Communities.6TONK OON EN.Fibre-optic techniqu
19、es for broadband ac2cess networks J.Telektronikk,2005,2.作者简介宋洪彬(1981-),男,籍贯四川威远,2006年7月毕业于西安科技大学通信工程专业,中国电子科技集团公司第八研究所系统工程部助理工程师,从事安防监控系统、报警系统、光纤网络工程、综合业务数字网络系统等系统工程的设计与施工,单片机设计与应用等工作。(上接第567页)参考文献1 陶永华.新型PID控制及其应用M.北京:机械工业出版社.2 王树青.工业过程控制工程M.北京:化学工业出版社.作者简介高彬娜(1982-),女,籍贯甘肃陇西,毕业于吉林大学,主要从事半导体设备研究开发,重点研究运动控制技术。名师资料总结-精品资料欢迎下载-名师精心整理-第 5 页,共 5 页 -
 2022年数字PID控制在运动控制系统中的应用定义
2022年数字PID控制在运动控制系统中的应用定义