 2022年完整word版,CA6140普通车床横向进给系统的数控化改造设计说明书解析
2022年完整word版,CA6140普通车床横向进给系统的数控化改造设计说明书解析

《2022年完整word版,CA6140普通车床横向进给系统的数控化改造设计说明书解析》由会员分享,可在线阅读,更多相关《2022年完整word版,CA6140普通车床横向进给系统的数控化改造设计说明书解析(21页珍藏版)》请在装配图网上搜索。
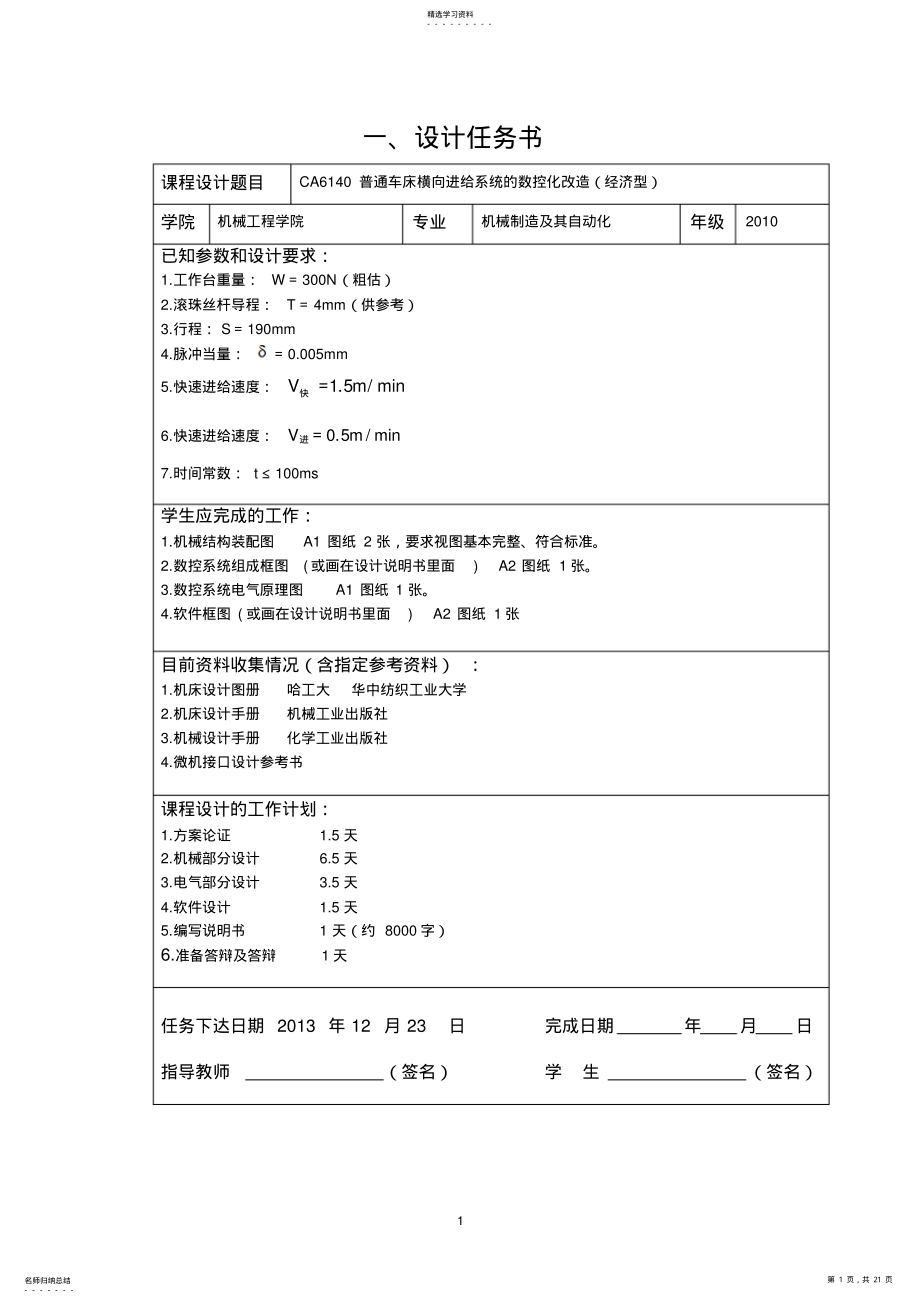
1、1 一、设计任务书课程设计题目CA6140 普通车床横向进给系统的数控化改造(经济型)学院机械工程学院专业机械制造及其自动化年级2010 已知参数和设计要求:1.工作台重量:W300N(粗估)2.滚珠丝杆导程:T 4mm(供参考)3.行程:S190mm4.脉冲当量:0.005mm5.快速进给速度:min/5.1 mV快6.快速进给速度:min/5.0mV 进7.时间常数:t100ms学生应完成的工作:1.机械结构装配图A1 图纸 2 张,要求视图基本完整、符合标准。2.数控系统组成框图(或画在设计说明书里面)A2 图纸 1 张。3.数控系统电气原理图A1 图纸 1 张。4.软件框图(或画在设计
2、说明书里面)A2 图纸 1 张目前资料收集情况(含指定参考资料):1.机床设计图册哈工大华中纺织工业大学2.机床设计手册机械工业出版社3.机械设计手册化学工业出版社4.微机接口设计参考书课程设计的工作计划:1.方案论证1.5 天2.机械部分设计6.5 天3.电气部分设计3.5 天4.软件设计1.5 天5.编写说明书1 天(约 8000 字)6.准备答辩及答辩1 天任务下达日期 2013 年 12 月 23 日完成日期年月日指导教师(签名)学生(签名)精选学习资料 -名师归纳总结-第 1 页,共 21 页2 二、设计要求2.1 总体方案设计要求总体方案设计应考虑机床数控系统的类型,计算机的选择,
3、以及传动方式和执行机构的选择等。(1)普通车床数控化改造后应具有定位、纵向和横向的直线插补、圆弧插补功能,还要求能暂停,进行循环加工和螺纹加工等,因此,数控系统选连续控制系统。(2)车床数控化改装后属于经济型数控机床,在保证一定加工精度的前提下应简化结构、降低成本,因此,进给伺服系统采用步进电机开环控制系统。(3)根据普通车床最大的加工尺寸、加工精度、控制速度以及经济性要求,经济型数控机床一般采用8 位微机。在 8 位微机中,MCS51 系列单片机具有集成度高、可靠性好、功能强、速度快、抗干扰能力强、具有很高的性价比,因此,可选 MCS51系列单片机扩展系统。(4)根据系统的功能要求,微机数控
4、系统中除了CPU 外,还包括扩展程序存储器,扩展数据存储器、I/O 接口电路;包括能输入加工程序和控制命令的键盘,能显示加工数据和机床状态信息的显示器,包括光电隔离电路和步进电机驱动电路,此外,系统中还应包括螺纹加工中用的光电脉冲发生器和其他辅助电路。(5)设计自动回转刀架及其控制电路。(6)纵向和横向进给是两套独立的传动链,它们由步进电机、齿轮副、丝杠螺母副组成,其传动比应满足机床所要求的分辨率。(7)为了保证进给伺服系统的传动精度和平稳性,选用摩擦小、传动效率高的滚珠丝杠螺母副,并应有预紧机构,以提高传动刚度和消除间隙,齿轮副也应有消除齿侧间隙的机构。(8)采用贴塑导轨,以减小导轨的摩擦力
5、。(9)原机床的主要结构布局基本不变,尽量减少改动量,以降低成本缩短改造周期。(10)机械结构改装部分应注意装配的工艺性,考虑正确的装配顺序,保正安装、调试、拆卸方便,需经常调整的部位调整应方便。Y向 X向微机机光电隔离功率放大步进电机光电隔离功率放大步进电机上拖板下拖板精选学习资料 -名师归纳总结-第 2 页,共 21 页3 经济型数控车床总体方案框图数控车床改造的总体方案示意图三、机械部分的改造设计和计算3.1 进给系统机械结构改造设计进给系统改造设计需要改动的主要部分有挂轮架、进给箱、溜板箱、溜板刀架等改造的方案不是唯一的。以下是其中的一种方案:挂轮架系统:全部拆除,在原挂轮主动轴处安装
6、光电脉冲发生器。进给箱部分:全部拆除,在该处安装纵向进给步进电机与齿轮减速箱总成丝杠、光杠和操作杠拆去,齿轮箱连接滚珠丝杠,滚珠丝杠的另一端支承座安装在车床尾座端原来装轴承座的部分。溜板箱部分:全部拆除,在原来安装滚珠丝杠中间支撑架和螺母以及部分操作按钮。横溜板箱部分:将原横溜板的丝杠的、螺母拆除,改装横向进给滚珠丝杠螺母副、横向进给步进电机与齿轮减速箱总成安装在横溜板后部并与滚珠丝杠相连。刀架:拆除原刀架,改装自动回转四方刀架总成。3.2 横向进给伺服系统机械部分的计算与选型进给伺服系统机械部分的计算与选型内容包括:计算切削力、滚珠丝杠螺母副的设计、计算与选型、齿轮传动计算、步进电机的计算和
7、选型等。精选学习资料 -名师归纳总结-第 3 页,共 21 页4 已知条件:1.工作台重量:W300N(粗估)2.滚珠丝杆导程:T4mm(供参考)3.行程:S190mm4.脉冲当量:0.005mm5.快速进给速度:min/5.1mV快6.切削进给速度:min/5.0mV 进7.时间常数:t100ms 3.2.1、传动计算uT360其中 表示步距角(本设计取0.75),表示脉冲当量(本设计是0.005mm)所以48.0360Tu3.2.2、切削力计算主切削力NfaFpC7.110815.05.21840184075.075.0切深抗力NFFFccp4.5547.11085.05.0)6.01.0
8、(走刀抗力NFFFccf4.5547.11085.05.0)7.015.0(式中pa 表示切削深度,f表示进给量,本设计取pa=2.5mm,f=0.15mm。3.2.3、滚珠丝杠设计计算横向运动的导轨形式常为燕尾形导轨,其轴向力的实验公式为:)2(WFFKFFpcfm式中,系数 K为 1.4,摩擦系数取 0.05 所以NWFFKFFpcfm902)3004.55427.1108(05.04.5544.1)2((1)疲劳强度计算滚珠丝杠的当量动载荷mC为:mQwmFFFLC3式中,L 为工作寿命,61060nTL,n为丝杠转速,T 为实用时间寿命,数控机床精选学习资料 -名师归纳总结-第 4 页
9、,共 21 页5 取)(15000 hT,故)10(135102100060106066g6转快TTVnTLwf为载荷系数,取 1.3;Qf 为精度系数,取1 因此NFFFLCmQwm9.61079021.12.113533由上述当量动载荷,且使用条件为横向进给,故选择丝杠FFB2205。(2)刚度验算滚珠丝杠的刚度按照下式校核:321丝杠的支撑方式:一端固定,一端简支。丝杠拉压弹性位移mm1004.9101.25.3-20445090235211)(AElFm丝杠副內滚珠与滚道的接触变形m77.1510902kF2m2,k2是预紧力为额定载荷的 1/3 时的接触刚度,查手册得k2=510.滚
10、 动 轴 承 的 接 触 变 形3/23/12w3ZD152.0mF)(,初 选 推 力 球 轴 承51104,56.5wD,14Z,代入上式得,m72.43。又因为轴承存在预紧力,所以mmm36.221,89.021,26.2413322111624.1245.0321,丝杠精度取 4 级。3.2.4、确定齿轮参数因为uT360,所以48.0360Tu,取241Z,502Z,齿轮模数mmm5.2因此mmmZdmmmZd100502,482422211,轴向长度mmlmml14,16213.2.5、步进电机的选择(1)负载转矩LM精选学习资料 -名师归纳总结-第 5 页,共 21 页6 mLF
11、M180式中,为电机到丝杠的总传递效率查机械设计手册取齿轮传递效率为0.98,滚动轴承 0.99,推力轴承 0.99,联轴器 0.99 滚珠丝杠的效率计算:导程角:。550.4)205(tan)(tan11ds效率:965.0)10550.4tan(550.4tan)tan(tan因此总效率:908.0965.099.098.04总故mNFMmL379.0908.075.090210005.01801803(2)滚珠丝杠副预紧引起的附加转矩0M00FK180M式中,0F为丝杠螺母的预紧力,K为预紧螺母内部的摩擦系数,取0.2 因此mN023.075.090210005.02.0180FK180
12、M3m0(3)加速度转矩mMJtffMm)(18001式中,1f为电机工作频率,切削进给时,Hzvf35000005.06010005.06010001进快速进给时,Hzvf5000005.06010005.16010001快Hzf2000(突跳起动频率)st1.0(加速时间))180()()()(23222110dmJJZZJJJ式中,0J为电机转子惯量,初取27.4cmkg精选学习资料 -名师归纳总结-第 6 页,共 21 页7 对于材料为钢的圆柱形零件,其转动惯量可按下式计算:LDJ44108.724414141745.06.18.4108.7108.7cmkgLDJ2442424248
13、.124.110108.7108.7cmkgLDJ244343435616.0452108.7108.7cmkgLDJ因此2412232221101046.8)75.010005.0180(8.93005616.048.1248.0745.07.4)180()()()(mkgdmJJZZJJJm5316.01046.81.0200-500018075.0)(1804-01)(NJtffMm)(空m1624.01046.81.0200-3500018075.0)(1804-01)(NJtffMm)(进因此选取)(空mM因此cmkgNMMMMmL336.9m933605316.0023.0379.
14、00。(空)总又因为25.1/MM电,取cmkgM672.18电根据上述转矩,查表选电机型号为110BF003。四、单片机型数控系统硬件电路设计4.1 设计内容(1)按照总统方案以及机械结构的控制要求,确定硬件电路的方案,并绘制系统电气控制的结构框图;(2)选择计算机或中央处理单元的类型;精选学习资料 -名师归纳总结-第 7 页,共 21 页8(3)根据控制系统的具体要求设计存储器扩展电路;(4)根据控制对象以及系统工作要求设计扩展接口电路,检测电路,转换电路以及驱动电路等;(5)选择控制电路中各器件及电气元件的参数和型号;(6)绘制出一张清晰完整的电气原理图,图中要标明各器件的型号,管脚号及
15、参数;(7)说明书中对电气原理图以及各有关电路进行详细的原理说明和方案论证。4.2 控制系统的功能要求(1)z向和 x 向进给伺服运动控制(2)自动回转刀架控制(3)螺纹加工控制(4)行程控制(5)键盘及显示(6)面板管理(7)其他功能:光电隔离、功率放大、报警、急停、复位。4.3 硬件电路的组成:后面所画大图采用MCS-51 系列单片机组成的控制系统硬件电路原理图。电路的组成如下:(1)CPU采用 8031芯片;(2)扩展程序存储器2764 两片,6264一片;(3)扩展可编程接口芯片8155 两片;(4)地址锁存器,译码器个一个;(5)键盘电路,显示电路;(6)光电隔离电路,功率放大功率;
16、(7)越程报警电路,急停电路,复位电路;(8)面板管理电路。精选学习资料 -名师归纳总结-第 8 页,共 21 页9 数控系统结构框图4.4 选择电气元件及电路设计4.4.1 微机机型和扩展存储器的选择确定微机机型就是选择CPU。单片机价格低、可靠性较高,适用于控制,选择单片机做控制器比较合适。根据总体方案的确定,微机采用MCS-51 系列单片机。51 系列有三种型号:8031是无 ROM 的 8051;8751 是用 EPROM 代替 ROM 的 8051。目前,工控机中应用最多的是 8031 单片机。本设计就采用8031 单片机。8031 单片机是美国Intel 公司的产品 MCS51 系
17、列单片机的一个型号,是目前性能较高的 8 位单片微型计算机。8031单片机内部包含一个8 位 CPU,128字节的 RAM,两个 16位定时器,四个八位并行口,一个全功能串行口,可扩展的外部程序存储器和数据存储器的容量为64K 字节,具有 5 个中断源并配有两个优先级,还有 21 个特殊功能寄存器。所以 8031 单片机是一种理想的8 位微型计算机,在各种数控系统中的到广泛的应用。A程序存储器的扩展a选用 2732 芯片常用的 EPROM 存储器有 2716,2732,2764,27128,27256 等,容量分别为 2K、4K、8K、16K,32K。由于车床数控系统包括系统控制程序和加工程序
18、,采用 4KB8 的 2732 芯片。2732 芯片是一个有 24 根引脚的双列直插式集成元件。该芯片共有13 根地址线 A0A12,8 根数据线 D0 D7,其余的为控制线。2732 低八位地址线和74LS373的输出端连接,高六位地址线直接与8031 的P2.0P2.5 连接。它的八位数据线直接与8031的 P0口连接。b地址锁存器 74LS373 CPU I/O 接口光电隔 离功率放 大步进电 机RAM ROM 外设键盘、显示器精选学习资料 -名师归纳总结-第 9 页,共 21 页10 单片机规定 P0 口提供低 8 位地址线,同时又要作为数据线,所以P0 是一个分时输出低 8 位地址和
19、数据的通道口。为了把地址信息分离出来保存,提供外接存储器的低 8 位地址信息,通常采用74LS373 作为地址锁存器。除 74LS373外,74LS273、8282、8212 等芯片也可用作地址锁存器,使用时接法稍有不同,由于接线稍繁,多用硬件和价格稍贵,故不如74LS373 用得普遍。74LS373 作为地址锁存器。D1D8是输入端,Q1 Q8是输出端,CE是片选端,片选端 G与 8031单片机的地址锁存信号ALE连接。当片选端 G=1时,74LS373的输出端与输入端相通,当G端从高电平返回低电平(下降沿)时,输入的地址信息就被锁入 Q1 Q8中。B数据存储器的扩展a选用 6264芯片数据
20、存储器选用 8K8 位的 6264 芯片。6264 低 8 位地址线通过地址锁存器74LS373与 8031P0口相接,高 5 位地址线分别与P2.0P2.4 相连,8 位数据线直接接到 8031P0口,读写控制引脚 OE,WE 与 8031 的读写控制引脚 RD,WR 直接相连,片选端 CE1通过译码电路与 8031 相连。b地址译码器 74LS138 外部芯片都通过总线与单片机连接,单片机数据总线分时地与各个外部芯片进行数据传送,故需进行片选控制。若芯片内有多个地址单元时,还要进行片内地址选择。8031 单片机应用系统的地址译码规定,外部扩展芯片与数据存储器统一编址,所以外部芯片不仅占用数
21、据存储器一定数量的地址单元,而且要使用读/写信号与读/写指令完成数据传送。经济型数控硬件结构中采用全地址译码方式。所谓全地址译码是:低位地址作为片内地址,高位地址用译码器译码,译码器输出的地址选择信号作为片选线连至每个外部芯片的片选端。地址译码常用 74LS138译码器,G1、G2A和 G2B是赋能端,A、B、C是选择端,Y0Y7是输出端。74LS138地址译码电路输入端出占用了8031单片机的 P2.5P2.7 三根高位地址线,剩余的13 根地址线用作数据存储器的内地址线。74LS138译码器每一个输出端可接一个外部芯片的片选端实现分时片选控制,因此,一个74LS138译码器的 8 根输出端
22、可以连接8 个 8K字节地址空间。单片机的读/写信号经过与门后控制译码器的赋能端G2A、G2B,这就保证只有在读/写状态时译码器输出端才会输出片选。4.4.2 确定 I/O 接口8031 只有 P1 口可作为普通 I/O 口用,所以需扩展。键盘需要32 个键,采用矩阵式键盘,需12 个 I/O 口;显示器采用 6 个 LED,需 6 个 I/O 接口;两个三相步进电机,采用软件环行分配器,需6 个;刀架需 4 个;紧急停需 1 个。采用一片 8279 芯片和一片 8255A 即可。键盘/显示器接口采用 8279 芯片,因为 8279 芯片是专用的键盘/显示器接口精选学习资料 -名师归纳总结-第
23、 10 页,共 21 页11 芯片,还可以编程。8279 芯片具有消颤(去抖动)、双键同时按下保护功能。显示控制亦按扫描方式工作,可以显示8 或 16 个数码(字符)。LED 的个数应满足显示值的要求和便于显示。8279与单片机 8031的连接无特殊要求,除数据线、RESET、WR、RD 直接连接外,CS 与 74LS138 译码器输出线Y1 相连;8279 的 IRQ 经反相器与 8031的中断请求输人线INT1 相连;时钟输人端 CLK 与 8031的地址锁存控制端ALE相连。8279 键盘最大可配置 88 个键,实际用了 32个键。扫描线信号为 SL0SL2,经 74LS138 译码器输
24、出的 4 个列选信号,接入键盘列线。键盘行查询用了RL0RL7 的 8 根回馈线,接人键盘行线。8279 配置的 8 位共阴极 LED 显示器,其字位线由扫描线SL0SL2 经译码器、驱动器提供,字段线由OUTA0OUTBA3、OUTB0OUTB3 通过驱动器提供。4.4.3 键盘接口设计首先判断键盘上有无键闭合,先送8255 的 PA 口一个数据为00H,使列线PA0 PA7的电平均为 0,然后读 PB口的 PB0 PB2的状况;若不全为“1”,则有键闭合,此时延时10ms去掉抖动后再判断有无键闭合。如无则继续扫描,如有则判断按下的键号。如确定有键按下时,便开始计算键值。当采用 8 行 4
25、列的键盘时,定义第一行的键为 00H03H,定义第二行键的键值为04H07H,依次类推。首先判断是哪一行有键闭合,若第一行有键闭合,设置初值为00H,若第二行有键闭合,则设置初值为 04H,依次类推。接着对列线进行扫描以判断是哪一列闭合。方法上使 PA0 对应的列线输出低电平,其余均为高电平,判断一下是否第一列有键闭合,如有则列计数为00H,与初值相加则为键值,也即是键盘的键号,如无则把低电平移到第二列上再判断,直到四列线全判断完毕,找出列线为止。然后计算键值,最后可根据键号跳转到相应的键功能程序的入口。4.4.4 步进电机驱动电路设计(1)脉冲分配器步进电机的控制方式由脉冲分配器实现,其作用
26、是将数控装置送来的一系列指令脉冲按一定的分配方式和顺序输送给步进电机的各相绕组,实现电机正反转。数控系统中通常使用集成脉冲分配器和软件脉冲分配器。本设计采用集成脉冲分配器 YB013。(2)光电隔离电路在步进电机驱动电路中,脉冲分配器输出的信号经放大后控制步进电机的励磁绕组。如果将输出信号直接与功率放大器相连,将会引起电气干扰。因此在接口电路与功率放大器间加上隔离电路实现电气隔离,通常使用光电耦合器。精选学习资料 -名师归纳总结-第 11 页,共 21 页12(3)功率放大器脉冲分配器的输出功率很小,远不能满足步进电机的需要,必须将其输出信号放大产生足够大的功率,才能驱动步进电机正常运转。因此
27、必须选用功率放大器,需根据步进电机容量选择功率放大器。本设计选用功率放大器。4.4.5 其它辅助电路设计()的时钟电路单片机的时钟可以由两种方式产生:内部方式和外部方式。内部方式利用芯片的内部振荡电路,在XTAL1,XTAL2引脚上外接定时元件,如下图所示。晶体可以在.之间任意选择,耦合电容在 pF之间,对时钟有微调作用。采用外部时钟方式时,可将XTAL1直接接地,XTAL2接外部时钟源。()复位电路单片机的复位都是靠外部电路实现。在时钟工作后,只要在引脚上出现 ms 以上的高电平,单片机就实现状态复位,之后便从单元开始执行程序。在实际运用中,若系统中有芯片需要其复位电平与复位要求一致时,可以
28、直接相连。五、系统控制软件的设计5.1系统控制软件的主要内容数控系统是按照事先编好的控制程序来实现各种控制功能。按照功能可将数控系统的控制软件分为以下几个部分:1、系统管理程序:它是控制系统软件中实现系统协调工作的主体软件。其功能主要是接受操作者的命令,执行命令,从命令处理程序到管理程序接收命令的环节,使系统处于新的等待操作状态。2、零件加工源程序的输入处理程序。该程序完成从外部I/O 设备输入零件加工源程序的任务。3、插补程序。根据零件加工源程序进行插补,分配进给脉冲。4、伺服控制程序。根据插补运算的结果或操作者的命令控制伺服电机的速度,转角以及方向。诊断程序。包括移动不见移动超界处理,紧急
29、停机处理,系统故障诊断,查错等功能。精选学习资料 -名师归纳总结-第 12 页,共 21 页13 5、机床的自动加工及手动加工控制程序。6、键盘操作和显示处理程序。包括监视键盘操作,显示加工程序、机床工作状态、操作命令等信息。5.2 软件设计5.2.1 系统控制功能分析数控 X-Y 工作台的控制功能包括:(1)、系统初始化。如对 I/O 接口 8155,8255A进行必要的初始化工作,预置接口工作方式控制字。(2)、工作台复位。开机后工作台应该自动复位,亦可手动复位。(3)、输入和显示加工程序。(4)、监视按键,键盘及开关。如监视紧急停机键及行程开关,键盘扫描等功能。(5)、工作台超程显示与处
30、理。工作台位移超过规定值时应该立即停止工作台的运动,并显示相应的指示字符。(6)、工作台的自动控制。(7)、工作台的手动控制。(8)、工作台的联动控制。5.2.2 系统管理程序控制管理称许是系统的主程序,开机后即进入管理程序。其主要功能是接受和执行操作者的命令。在设计管理程序时,应确定接收命令的形式,系统的各种操作功能等。数控 X-Y 工作台的基本操作功能有:输入加工程序,自动加工,刀位控制,工作台位置控制,手动操作,紧急停机等。5.2.3步进电机控制子程序设计步进电机的控制包括速度,转角及方向的控制。步进电机在突然启动或停止时,由于负载和惯性,会使电机失步,所以电机运行时有一个加,减速过程。
31、通过确定进给脉冲数和脉冲时间间隔,即可实现步进电机转角与速度的控制。(1)时间常数的确定在步进电机控制程序中,利用单片机的定时器中断,延时产生进给脉冲的时间间隔。此间隔由送入定时器的时间常数决定。时间常数由下式计算:精选学习资料 -名师归纳总结-第 13 页,共 21 页14 361010eeTTt式中:T为脉冲时间间隔(ms);et为单片机机器周期(s),在时钟为 6MHz时,et=2s。(2)步进电机加,减速进给脉冲及脉冲时间间隔的确定设步进电机加,减速方式为直线加,减速。要使步进电机不失步,应满足:mgITTT式中:mT为步进电机启动力矩;gT为负载力矩;IT为惯性力矩。由步进电机max
32、jT=3。92N。m,取步进电机的加速启动力矩max0.8660.33920.8660.3101.84MjTT则使步进电机不失不的惯性力矩101.8496.575.27.ImgTTTN cm步进电机角加速度2245.27 10676.25(/)0.7793 10IdTradsJ又maxbbmfddfdtdtt式中:mt为上升到步进电机最高频率所需时间,所以有:max21.5 166736064.5()676.25mbftms加速脉冲个数:3max11166764.5 1053.7622mnft精选学习资料 -名师归纳总结-第 14 页,共 21 页15 确定加减脉冲个数都为54 个又因为:ma
33、x0.50.5()nnnmfnftttt所以脉冲时刻max2mmnt ntf结合361010eeTTt可以算出对应各脉冲时刻的计数器时间常数。EPROM 存储器中,时间常数依次安排在首地址为1000H的存储单元中,每个时间常数占据两个字节,低位地址存放时间常数低8 位,高位地址存放时间常数高 8 位。在程序中,设置加速,恒速,减速脉冲计数器N0,N1,N2。以计数器的值是否为 0 作为相应过程是否结束的标志。步进电机控制程序框图如下所示:图 5-3 步进电机控制子程序精选学习资料 -名师归纳总结-第 15 页,共 21 页16 图 5-4 步进电机控制中断服务程序5.2.4 编语言程序设计(1
34、)内存地址分配加速脉冲数计数器N0 地址设为 20H;恒速脉冲数计数器N1 低 8 位字节地址为 21H,高 8 位字节地址位 22H;减速脉冲数计数器N2 地址位 23H。加速,减速,恒速脉冲总数寄存器N 低位字节地址位24H,高位字节地址位 25H;精选学习资料 -名师归纳总结-第 16 页,共 21 页17 步进电机进给控制子程序FEED 首地址位 0E80H。每调用一次该程序,步进电机按规定方向进给一步。(2)程序清单7N0 EQU 20H;加速N1L EQU 21H;恒速N1H EQU 22H N2 EQU 23H;减速NL EQU 24H;脉冲总数寄存器NH EQU 25H DS
35、EQU 26H;地址指针偏移量FEED EQU 0E80H ORG 0E00H 0E00 758160 0E03 758901 START:MOV P,#60H MOV TMOD,#01H;设计数器工作方式为1,16 位定时器MOV N0,#01A4H;设 N0 为 320 MOV N2,#1A4H MOV A,N0;计算 2XN0 RL A MOV R0,A CLR C;计算 N1=N-2N0 MOV A,NL SUBB A,R0 MOV N1L,A MOV A,NH SUBB A,#00H MOV N1H,A MOV DPTR,#1000H;设时间常数指针初值为1000H 精选学习资料 -
36、名师归纳总结-第 17 页,共 21 页18 MOV DS,#00H;设地址偏移量初值为00H MOVC A,A+DPTR;从 EPROM 中读时间常数MOV TL0,A;送时间常数至定时器0 中INC DS MOV A,DS MOVC A,A+DPTR MOV TH0,A INC DS SETB EA;开中断允许SETB ET0;允许定时器 0 中断SETB TR0;启动定时器 0 开始计算WAIT:JB EA,WAIT;中断允许返回RET 中断服务程序:ORG 000BH LJMP 0F00H MOVC A,A+DPTR MOV TL0,A INC DS MOV A,DS MOVC A,A
37、+DPTR MOV TH0,A INC DS;修改地址偏移量指针ACALL FEED;调 FEED 子程序MOV A,N0;判断 N0 是否为 0 CJNE A,#00H,LOOP1 MOV A,N1H;判断 N1 是否为 0 CJNE A,#00H,LOOP2 MOV A,N1H 精选学习资料 -名师归纳总结-第 18 页,共 21 页19 CJNE A,#00H,LOOP2 MOV A,N2 判断 N2 是否为 0 CJNE A,#00H,LOOP3 CLR EA;N2 为 0,减速结束,关中断RETI LOOP1:DEC N0;N0 不为 0,则 N0N0-1 RETI LOOP2:MO
38、V A,N1L;N1 不为 0,则 N1N1-1 CLR C SUBB A,#01H MOV N1L,A MOV A,N1H SUBB A,#00H MOV N1H,A RETI LOOP3:DEC N2;N2 不为 0,则 N2N2-1 RETI 精选学习资料 -名师归纳总结-第 19 页,共 21 页20 六、心得体会通过此次课程设计,使我更加扎实的掌握了有关自己专业方面的知识,在设计过程中虽然遇到了一些问题,但经过一次又一次的思考,一遍又一遍的检查终于找出了原因所在,也暴露出了前期我在这方面的知识欠缺和经验不足。实践出真知,通过亲自动手制作,使我们掌握的识不再是纸上谈兵。过而能改,善莫大
39、焉。在课程设计过程中,我们不断发现错误,不断改正,不断领悟,不断获 取。最 终 的 检 测 调 试 环 节,本 身 就 是 在 践 行“过 而 能改,善 莫 大 焉”的知行观。这次课程设计终于顺利完成了,在设计中遇到了很多问题,最后在老师的指导下,终于游逆而解。在今后社会的发展和学习实践过程中,一定要不懈努力,不能遇到问题就想到要退缩,一定要不厌其烦的发现问题所在,然后一一进行解决,只有这样,才能成功的做成想做的事,才能在今后的道路上劈荆斩棘,而不是而退,那样永远不可能收获成功,收获喜悦,也永远不可能得到社会及他人对你的认可!课程设计诚然是一门专业课,给我很多专业知识以及专业技能上的提升,同时
40、又是一门讲道课,一门辩思课,给了我许多道,给了我很多思,给了我莫大的空间。同时,设计让我感 触 很深。使我对抽象的理论有了具体的认识。通过这次课程设计,我掌握了对普通车床的改造有了系统性的认识和基础性的把握;熟悉了其设计原理及流程;并对传动系统和伺服系统进行了针对性的学习。而且使我具有初步设计计算的能力以及分析和处理生产中所遇见的机、电方面技术的能力。当然设计中还存在很多不足,有待于改进,我会在以后的实际工作中不断弥补不足、创新进取。精选学习资料 -名师归纳总结-第 20 页,共 21 页21 参 考 文 献1 罗永顺主编.机床数控化改造实例 M.北京:机械工业出版社,2009.6 2 罗永顺主编.机床数控化改造技术 M.北京:机械工业出版社,2007.5 3 杨雪宝主编.机械制造装备与设计 M.西安:西北工业大学出版社,2010.4 4 张立勋等.机电一体化系统设计 M.哈尔滨:哈尔滨工程大学出版社.2000.5 丁洪生主编.机械设计基础 M.北京:机械工业出版社,2000 6 张毅刚.单片机原理与应用 M.北京:高等教育出版社,2003.7 汪道辉.单片机系统设计与实践 M.北京:电子工业出版社,2006.8 机床设计手册 M.北京:机械工业出版社,2005.精选学习资料 -名师归纳总结-第 21 页,共 21 页
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
