 2013-自动控制原理知识点总结
2013-自动控制原理知识点总结

《2013-自动控制原理知识点总结》由会员分享,可在线阅读,更多相关《2013-自动控制原理知识点总结(11页珍藏版)》请在装配图网上搜索。
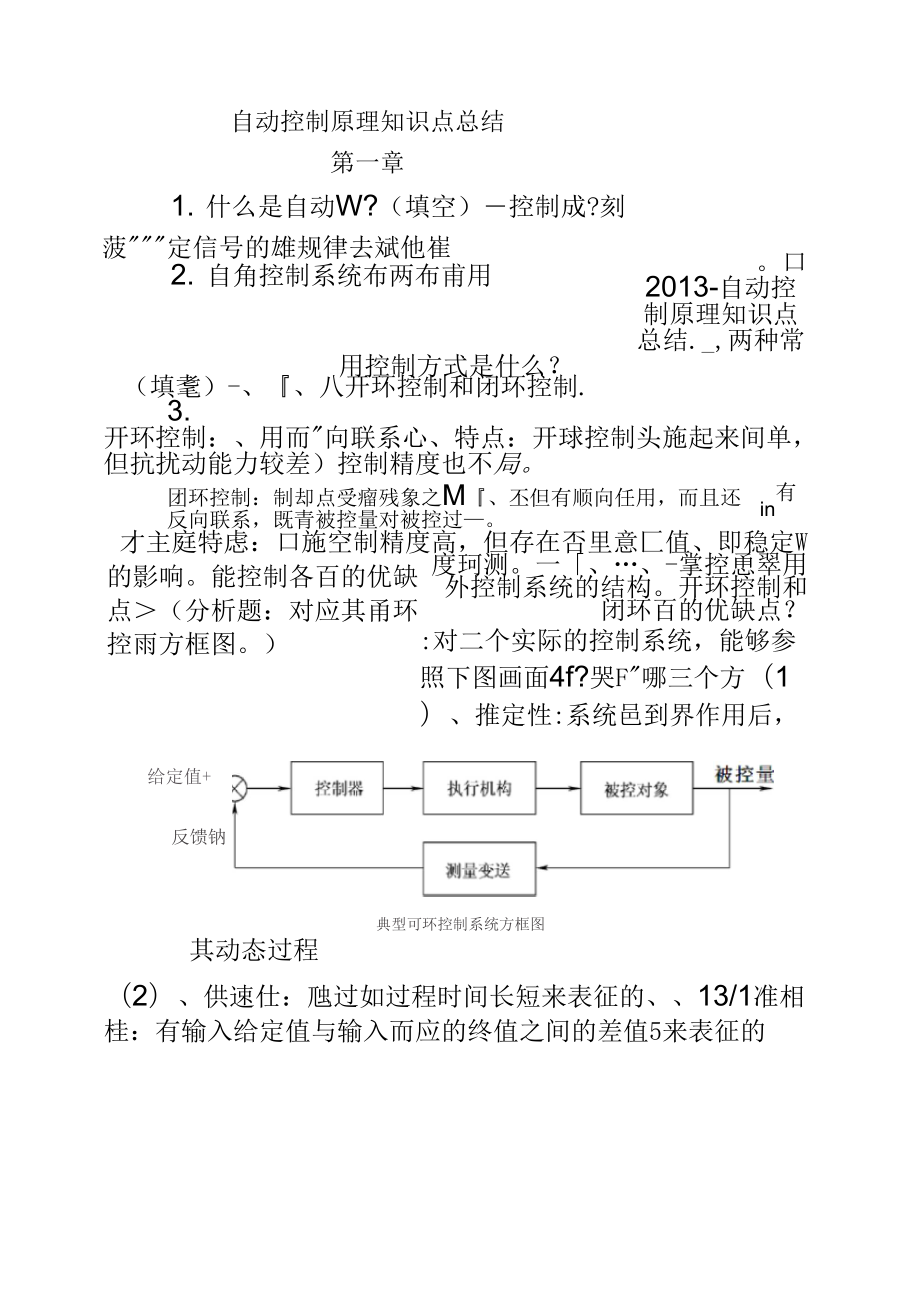
1、2013-自动控制原理知识点总结自动控制原理知识点总结第一章1. 什么是自动W?(填空)控制成?刻菠定信号的雄规律去斌他崔2. 自角控制系统布两布甫用。口._,两种常用控制方式是什么?(填耄)-、八开环控制和闭环控制.3.开环控制:、用而向联系心、特点:开球控制头施起来间单,但抗扰动能力较差)控制精度也不局。in团环控制:制却点受瘤残象之M、丕但有顺向任用,而且还有反向联系,既青被控量对被控过。才主庭特虑:口施空制精度高,但存在否里意匚值、即稳定W度珂测。一、-掌控恿翠用外控制系统的结构。开环控制和闭环百的优缺点?的影响。能控制各百的优缺点(分析题:对应其甬环控雨方框图。)给定值+反馈钠典型可
2、环控制系统方框图:对二个实际的控制系统,能够参照下图画面4f?哭F哪三个方(1)、推定性:系统邑到界作用后,其动态过程(2)、供速仕:虺过如过程时间长短来表征的、13/1准相桂:有输入给定值与输入而应的终值之间的差值5来表征的第二章1.,猝制系统的数学建型有仕么乙(填窖一“的!!痛1帛搠态结构图、频率特性25赫膀建立微分方程H小工一、曰入重有关的项与在方程式等的项写犯笠食腥边也上传递函数定义和性质?认真理解。(填空或选择)量的拉菁位眶弯换埔|魂也ML的、公必1七个贞型环节的隹递函数(必须掌握)传搦函数、,-程组、演的摹本物理规律,分别列写出相应的微分方程,并匕。.将与输.传递函数:.在零初始条
3、件下,线性定常系统输出解J一,3一广工、统输入三的拉普拉斯变换N比典型环节CsGsKRs输出不失真L不烝迟、威比例他复观堑A佰号勺变化,询信号的怯递没备惯杜,生GscCs1GsRsTs弗晚!出H杰能晴时完成与输入量完全一致的变化侔用*WRS作用。输出积累一段时向后,即使建入言蔚ST眦粮i3Hf入mxn/函数aiWWBBJ重点是给定作用下)、误差传递函数(董点是室定作用下):式2-63,、.2-64,2-66二宓的如一B,.(、与误差信号E(s)的比值,下的闭环传递函数和扰动信号D(s)作用下的闭借式,尤其墓武2-614汕人ccccP22-63、2-64、2-66称为辱霸蒲黝智富HS给定信号R(
4、s).4At、A.A.。、,、.J,、h.k2_4,/系统的开环传递函数-Bs八八,_,GksG1sG2sHsGsHsEs系统Bg环W给定信号R(s)CsG1sG2sGssRs1G1sG2SHs1GsHs传I递函数夔函I作用,设D(s)=0IPn,函扰动信号D(s)作用,设R(s)=0给定信号R(s)作用,设D(s)=0CsG2sG2sDs1G1sG2SHs1GsHsEs11ersRs1G1sG2SHs1GsHsEsG2sHsG2sHseds_八.Ds1G1sG2SHs1GsHs扰动信号D(s)作用,设第三章各自的定义,各自R(s)=0牙、一Itr量+彩(1(1)、上升时|日的日漏系统响应从零
5、开始,第一次上升到稳态值所Hjp_、tp指系统响应从零开始,第一次到达峰值所需的时间r、超调量%(平稳性)指系统响应超出稳态值的最大偏离量占稳态值的百分比手(4旭如上旨系、统响应网收达到并保持在稳杏值的5%(或2%)误差范围内,即响应进均粮点5%j备2%尊营带之内所需的时间值之苛*信号揣BOfUWOlF阶蟋ts.nr*态危淳7乱箪位斜梭彩r斗7甬AVRA-PXO相应e米看单位斜坡P质的导数务单位O某就圭于该输入信亏输出响阶跃浦应,而单位阶跃响应的导数是单位脉冲响应由购獴申“.一Jj混障积分的输出响应,3(i)ISjb数、两个参数各自的含义;阻f,,一UE.2*f填空)越就/、,繇葡应糙斟虽二1
6、*育冗L时,系统输出为等俪振荡,示能正南工作,属不稳定、则.的大号3)%龊,巍甘单位响应:3-233-27;参考P51例3-4的欠阻尼情况、P72:M3-6;欠阻尼二阶系统的性能指标:(1)、上升时间trCtr1Fsin瑞照昏囱勺分蔻不同阻尼比时响应:(膜空)P(47人井伯出:掌握式3-21、dtr1其中arctan2由此式可得trdn.1J涉时叭“粮据tp的定义,可米用求极值的万法来求取它,、超调量%e,、L100%、调节时间tsts0.685%误差带nts0.762%误差带n当大于上述值时,可采用近似公式计算1c/ts6.451.7n(5)、稳态误差essess-n在系统稳定的前提下,主要
7、分析系统的动态性能和稳态性件稳态性能。动态性能包括平稳性和快速性,是指准确性。(1) 、平稳性主要有决定,平稳性越好。当系统等幅振荡,不能稳定工作。一定时,系统平稳性变差。(d3(2) 、快速性当3n-定时,若较小,则ts,而当即太大或太小,快速性均变差。ts=0时,0.7之又有ts。一般,在控制工程中,是由对超调量的要求来确定的.。一定时,nts由此分析可知,要想获得较好的快速性,阻尼比不能太大或是太小,而n可尽量选大。一般将=0.707称为最佳阻尼比,此时系统不仅响应速度快,而且超调量小。(3)、准确性的增加和n的减小虽然对于系统的平稳性有利,但将使得系统跟踪斜坡信号的稳态误差增加七矣级梅
8、定的允罢条住?r工4一/“二系乡如所五特伐眼的实部小于零,其特征万程的根部都在S劳斯判据的简单应用:参考P55例3-5、3-6。(分析题)劳斯稳定判据.具劳斯切1第二兀素也为目凰,*伺媒0|计十p备避股与系统的n蹬歌有关,输入有关,设索统的输入的一般表达式务Rs鸟式中N为输入的阶次蓼W必要条件),W均为正值,贝If叫应咐系统是稳定LJI八“列兀素符号改变的次数等T该特征万程I心、/sn题)P(60)参也与令系统的开环传递函数一般表达式为mKi1GsHsnnmsvTj1式中,K为系统的开环增益,即开环传递函数中各因式的常数项为1时的总比例系数;i、Tj为时间常数;v为积分环节的个数,由它表征系统
9、的类型,或称其为系统的无差度系统的稳态误差可表示为Aessrlimsfsrs0k1Sv误差可芬另,由给7E信号引起整以表5-1给定信号作用下系统稳态误差essr项Z条统剧号阶跃桁号输入Rs*s速度彳曰号输入Rs君s加速度桁号输入Rs刍s急态口天Roessr1KpV。essrKva0essrKa静态位置误差系数Kp静态速度误差系数Kv静态加速度误差系数KaKplimKvps0SvIZ.KKvsm0Sv1IZ!KKasm0Sv20Ro1KpOOOOI0_v)_KvOOn00a0Ka土牌PPf!态增益来确定的。为了提局精度等奕可增加积分环节戚数目:为i减少有叔至可增心环增益。但这岸一来都会植系经的罹
10、洛生变差。而菜用也偿的万法,则可保证稳定性的前据下减小稳态误差。第四章1.幅频特性、.相频特性和频率特性的概念。上:a()=|G(j)|、匕亡n十GrjW环积环例节分节=A()e人=|可2.七个典型其伯德图的形状G(j)奇答题)(必须掌握)。了解-90IF率dB/dec0-20L()20lgk1,L010,L20dB微环惯环90201,L010,L20dB性节1Ts1arctanT.1T2GsTs1.1T2arctanT-20和00和20L()20lgA环节最相环壬非小您TTS0-400,L1Aarctan2n,Aarctan1(1) 比例环节、积分环节、惯性环茧、微;分环节、一阶微分环节、振
11、荡环节、(时滞环帝、)乖最小相位环节3.绘制L(3)、将开卧传谗函戡标侦(2) 、找出各环节的转折频率,且按大小顺序在坐标中标出来。、迂3=1,L(3=20lgk这点,作斜率为-20vdB/dec觐率葺瓣WWWW改O缺蹄率,从而圆出;画出招数相频特性的近似曲线。(分析题厂P900;K,5.奈氏判据的用法:参考P111习题4-6。(分析6.曲位裕量机J的概念、意义及工程中对(或判断)=1田的频率c称为穿越频率,线上,模值为1处对应的台每到某一环节的转折,对麴幅、特性的推似尚线,八_t,(克3退据稼应才用对数相频特性的表达式,一4.根据伯德图求传递函数:参考P110习题440题)P94二者年求或称
12、4矢量乌负实周之间的夹角,其算式为:=(c)+180Ac1幅值裕量Kg:开环频率特性的相角g180时,在对应的频率g处,开环频率特性的幅值IGjgHjg|,其算式为:Kg可1S嗷,Kg值越大,说明系统的相对稳定性越好;反之,当Kg1时,对应的闭环系统不稳定。7.开环频率特性与时域指标的关系中低频段、频段、XO响it么t能?稳蜀4能:动杏也能i垣丰扰能力”还章押伸裕量南务越硕率各自影响什么性能?(填空或判断)占招何裕英:二般想型酱U越&系第的粗对稳定性越好。在工程中,虺常要求在30至膈之向第五章什么?(填空)1戒2.PIDS(1)utKp6t务越频率:c来反映系统的快速性瓣申晶反僵源PID控制:时域表达式P122式5-18tdKiedKdet0dtP、PI、PD、PID控制各自的优缺点?(简答题)
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
