 6水下声标定位第六章讲解
6水下声标定位第六章讲解

《6水下声标定位第六章讲解》由会员分享,可在线阅读,更多相关《6水下声标定位第六章讲解(7页珍藏版)》请在装配图网上搜索。
1、第六章 水下声标定位水声定位系统是用于测定水下或水面运载工具位置的定位系统。水声定位系统利用超声波传播信 号,具有的方向性好、贯穿能力强的特点。水声定位系统有三种工作方式:长基线系统、短基线 系统和超短基线系统。6.1 水声定位基础6.1.1 水声定位的基本设备水声定位系统通常由船台设备和若干水下设备组成。船台设备包括一台具有发射、接收和测 距功能的控制、显示设备和置于船底的换能器(也可置于船后的“拖鱼”内)以及水听器阵。水 下设备主要是声学应答器基阵。所谓基阵,即固设于海底的位置已准确测定的一组应答器阵列。 水声定位系统中有关电子设备的电路工作原理与一般电子线路相同,在此不予赘述。下面仅简要
2、 介绍系统中的水声设备。换能器是一种声电转换器,能根据需要使声振荡和电振荡相互转换。为发射(或接收)信号 服务,起着水声天线的作用,如经常使用的磁致伸缩换能器和电致伸缩换能器。磁致伸缩换能器 的基本原理是当绕有线圈的镍棒(通电)在交变磁场作用下会产生形变(振动)而产生声波,电 能转变成声能;而磁化了的镍棒在外力(声波)作用下产生形变(振动),从而使棒内的磁场也 相应变化,而产生电振荡,声能转变为电能。水听器本身不发射声信号,只是接收声信号。通过换能器将接收的声信号转主成电信号。输 入船台或岸台的接收机中。应答器既能接收声信号,而且还能发射不同于所接收声信号频率的应答信号。它是水声定位 系统的主
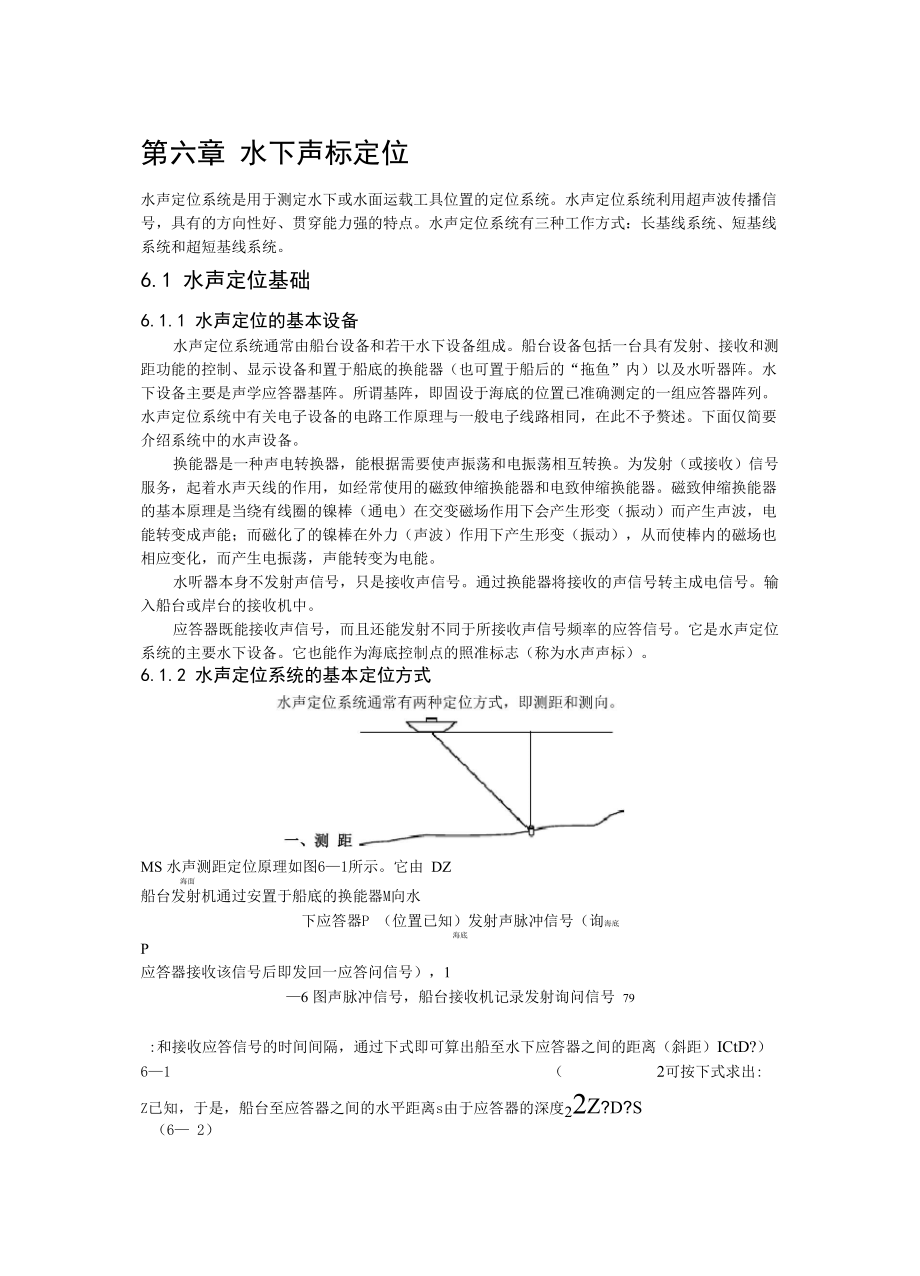
3、要水下设备。它也能作为海底控制点的照准标志(称为水声声标)。6.1.2 水声定位系统的基本定位方式MS 水声测距定位原理如图61所示。它由 DZ海面船台发射机通过安置于船底的换能器M向水下应答器P (位置已知)发射声脉冲信号(询海底海底P应答器接收该信号后即发回一应答问信号),16 图声脉冲信号,船台接收机记录发射询问信号 79:和接收应答信号的时间间隔,通过下式即可算出船至水下应答器之间的距离(斜距)ICtD?)61(2可按下式求出:z已知,于是,船台至应答器之间的水平距离s由于应答器的深度22Z?d?s(6 2)当有两个水下应答器,则可获得两条距离,以双圆方式交会出船位。若对三个以上水下应
4、答器进行测距,就可采用最小二乘法计算船位的最或然值。示。船台上除安置换能器以外,还在船AtP。和b的两侧各安置一个水听器,即ab0a d/2 M,方向与水听器a为水下应答器。设PM 0tA之间距离ba、连线之间的夹角为b 0,。为d,且aM=Bm=d/2航首.向发射询问信号,水下首先换能器M航首方向接收后,发射应答信号,水听应答器P2图6均可收到应答信号,器a、b和换能器M间距离相比甚小,故可视发射与接收的声信号方 向相互平行。由于a、b之间距离与P、M的要超Ma接收到信号相位比距P的距离并不相等,若 以M为中心,显然但由于a、M、b相位超前和滞后的bt分别为a和A前,而b接收到的信号 相位比
5、M的要滞后。设At和a和b接收信号的相位分别为:2时延,那么由图一9,我们可写 出?d?t?COS?_ a? )6(3?d?cos?t?_ b?于是水听器a和b的相位差为:?d2?cos?(6 4) ? 显ab然当0=90时,a和b的相位差为零。这只有船首线在P的正上方才行。所以只要在航行中使 水听器a和b接收到的信号相位差为零,就能引导船至水下应答器的正上方。这种定位方式在海 底控制点(网)的布设以及诸如钻井平台的复位等作业中经常用到。80三、水声定位系统的工作方式 水声定位系统可采取许多不同的工作方式进行工作。例如,直接工作方式,中继工作方式,长基 线工作方式,短基线工作方式,超短基线工作
6、方式,双短基线工作方式等等。不同的水声定位系 统可以具有其中一种或多种工作方式。本章仅介绍长基线、短基线和超短基线定位系统。6.2 长基线系统6.2.1 概述长基线系统通常在海底布设三个以上的应x如以一定图形组成海底基阵,(或声信标),答器正三角形或正四边形等。基线长度按所要求的作一般位于基阵内,运载工具(测船)业区域确 定。p31 5通过测量距离确定点位。长基线系统定位精度可 p公里。 达到510米,测程约 T T 31p p一种是单长基线测量距离可采用两种方式:42 向测距,即采用声信标;另一种是双向测距,即 T2 采用应答器定位。3 图6T, TT, T是设置在3所示。如图64213)y
7、x,TzT (为测点,可用水海底的应答器,其高斯坐标为的深度。,为平均海面至Pinu?T点的坐标,用距离空间交会法就能确定的距离P (经 声线弯曲改正)声仪器测得P至苴(x,y,z)。 为提高定位精度,可进行多余观测,即由四个以上位置面误差方程,用平差方法求得( x, yz)点近似坐标的方法。最或然点位。下面讨论计算Pppp6.2.2定位点近似坐标计算?,则运载工具至Tl、T2的平面距离S、当采用两距离方式定位时,如选用S 21为:2121222?)z?(Sz?p111?222?)z(zS?(65)?p222?222)?(yy)x?(?Sx?21112281P所4T2与P点在平面上的关系如图6
8、 T1、T S1?,进可推算示,由图可知,由S、S、Sa ) X,y (而求得,而:S1l22lSpp2 12水位改正换能器吃水?z? p上面为两距离计算P点近似坐标的方法。B用三距选时,如离方式定位当采用T2?,的距T3,则运载工具至T1、T2和图64321?1, 23) i?(,离为:i2222?)?z?(zx)(?y?y)?(x?ppiiipi222222) zz?yy?z) ?(2xx?(xy?z)?(x?y?2z?z?z?xz?y) i?1,2,3(ppppiiiiippi22222设piiiiipi22?2yy?y?2xx?x(6则 6)ppiippi22?2yy?2xx?xy?7
9、) (6?2yy?xx?xy?2p2p2pp222(68)pp3pp33由(66)式减(67)式:? (2x?x) x? (2y?y) y减(67)式:?( 2x?x) x?( 2y?y) ?y69)p11p2122由(68)式6 1)(p232332p 由(69)式:?2(x?x?)xp1221?y(611)p)?y (2y2i?y)y?y?2(pg?x(612) p)(2x?x2将(611)式和(612)式代入(61),经整理可得:?(y?y)y)?)(y?y(y?i2i223i33?xp2x(y?y)?x(y?y)?x(y?y)123121332?(x?x)?x(x?)?)?(xx132
10、231312?yp2y(x?x)?y(x?x)?y(x?x)132213213 当采用具有多余观测方式定位时,可采用下面平差的方法计算最或然点位坐标。826.2.3 最或然点位坐标计算32)式建立位置线误差方程式:首先根据(3LAX?V?T?1?4)(i ,2,3,)v,v?(v,v,V 为13RR, R) yx,(与算的由p 的距离。423122?)x?xz (z?)R?(y?y)? b表示为以下形式:其中系数iix?x?Ripi)(14)piRy?i?z?zR?ipi?) b? (?)?z, ?y, ?X? (xT式中:的改正数;i4213?lR?111?lR?222?L )(6?Rl ?
11、lR? R,333444其中点近似坐标计分别表示4213ppTT,T, T,之间 abc? ?cab? ?A ?cab ?cab? a,111222333ipR?x?iyy?R?ipi?) b (6?_4i?1,ipiiipp?a?(?P.Rz?.2,3,Pii444解算上面位置线误差方程式可得: ?x?x?xp?y?y?y(615) ?p?z?zz?pZ视为精确值(已知值)时,则把,TT,平差计算测点,果只布设三个应答器3;坐标及其定位中误差。836.3 短基线系统 6.3.1 概述 H1所示,短基线系统水下部分仅需如图65:J而船上的接收基阵一,要一个声信标(或应答器)基线长度尽可能利用船
12、体的三个换能器构成长度和宽度,通常在10米以上。Rz连线指向船首的方向和互成正交的基阵,H1H2 b连线的长度为x定为轴,基线 H1H2H2。和 H3xTx5图6b指向海底的轴,指向右舷的方向为y长度为。二轴。短基线系统有声信标、应答器和响 应器三种工作方式,下面分别介绍。方向为Z声信标工作方式6.3.2的时间差TH2至T,由仪器测得H1、声信标工作方式是在海底设置声信标)?tt( ?t?)?t?t(t,则可求得点位坐标。T的时间差H1、H3至,2322分别z0y和、图66所示,设Ox如图6y、z轴间的夹角,可得:x为PT方向与、异 y tV?Rz ii?cos?一xRbb t?RV?xx22
13、?cos Tybbyyzy yy?cos?1?coscos? 而66图 yzx 为声波在海水中的传播速度。?cos? ?zx? ?cos?(xz?cos?yz?y ?cos?z z式中:式中:V为:x,yT声信标相对于船位P的坐标6 16)为定位时水听器T与声信标H的深度差。84这种系统主要用于深海采矿和钻井工程的动态定位。声信标常设置在井口旁边,用于保证钻井船只准确位于井口上方。因此在水平位移较小时,e x.Oy接近90 ;而九接??Ocos。同时:Xt?V? ?zcos?x?z?b?H1xx)17(6xx?V?t p ? ?coszzy?b?yY ?yyAx声信标相对于船位P在高斯投影平面
14、上的坐标?X, ?Y,由图增量67可以看出: ?X?xcosH?ysinH?ay x t (6 一18) ?Y?xsinH?ycosH ?yH式中:为定位瞬间,作业船只的坐标航x图67H=真航向+向。子午线收敛角。x船只的高斯坐标为:X?X?X?TP(619) ?Y?Y?Y?TP6.3.3应答器工作方式该工作方式是把设置在海底的声信标改换为应答器。此时,在作业船上要相应增加主动询问应答 器的系统和更加复杂的处理回答信号的设备。如图65,图66所示,通过测量作业船只至应 答器的距离和方位来确定船位:?cosx?x?cosy?(620)?y?cosZ?z应答器方式的主要优点是:1. 可测出传播路径
15、的绝对时间,因此应答器的三维空间坐标,在没有任何简化与假设的条件下, 就能测得。从而使短基线系统有能力将工作距离延伸至几倍的水深,扩大了系统的应用范围。2. 在多个参考声源工作时,可按顺序进行询问,便于控制。3. 应答器未被询问时,不发射,可节约能源,有利于延长工作时间。4. 便于回收应答器。6.3.4 响应器工作方式 响应器是通过电缆与作业船只相连的。响应器的发射是由船上的电信号控制,触发一次才发射一 次声脉冲。响应器的工作方式与应答器工作方式基本相同。不同之处,询问应答器是声路径;而询问响应器 是电路径,因而计算作业船只至响应器的距离,仅使用单程传播时间。与应答器工作方式相比, 该方式的优
16、点在于用电路径询问干扰小,可靠性好;其缺点是需用电缆连接,活动范围受限制。6.4 超短基线系统短基线系统适用于较大的船只,安装换能器较麻烦。 超短基线系统也仅需一个海底参考声源,也有声信标和应答器工作方式。它与短基线系统的区别 是其船底的水听器阵是将三(或四)个敏感元件集中安装在一只精密的容器内,敏感元件之间的 间距仅为几个厘米。容器内如安装如图65所示的三个敏感元件,可形成两个正交的基线bx、by,构成二维空间。 如安装四个敏感元件,可形成三个正交基线bx、by、bz,构成三维空间。通过测定T至H2的距离P,同时测定声波到达敏感元件Hl、H3、H4和H2的相位差Ax.A y、Az。这样船位P至应答器T的方向余弦为:? ?cos?b2? ? ?cos?b2? ? ?cosxxxyyyzz?b2?z带入(620)式即可求得应答器T相对于船位P的坐标x、y、z。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
