 zernike中文(可编辑修改word版)
zernike中文(可编辑修改word版)

《zernike中文(可编辑修改word版)》由会员分享,可在线阅读,更多相关《zernike中文(可编辑修改word版)(6页珍藏版)》请在装配图网上搜索。
1、什么是ZernikePolynomials通常人们会使用幕级数展开式的形式来描述光学系统的像差。由于泽尼克多项式和光学检测中观测到的像差多项式的形式是一致的,因而它常常被用来描述波前特性(泽尼克,1934)。但这并不意味着泽尼克多项式就是用来拟合检测数据的最佳多项式形式。在某些情况下,用泽尼克多项式来描述波前数据具有很大的局限性。比如说,当需要考虑空气扰动的时候,泽尼克多项式几乎没有什么价值。同样地,我们也无法找到一组合适的泽尼克多项式来描述单点金刚石车削加工(singlepointdiamondturningprocess)中的制造误差。为了准确地描述圆锥面光学元件(conicaloptic
2、alelements)的对准误差,必须对泽尼克多项式进行修正。盲目地使用泽尼克多项式来表达检测数据只会导致糟糕的结果。泽尼克多项式是由无穷数量的多项式完全集组成的,它有两个变量,p和8它在单位圆内部是连续正交的。需要注意的是,泽尼克多项式仅在单位圆的内部连续区域是正交的,通常在单位圆内部的离散的坐标上是不具备正交性质的。泽尼克多项式具有三个和其他正交多项式集不一样的性质。1. 泽尼克多项式z(p,研可以被化解为径向坐标p和角度坐标e的函数,其形式如下:Z(p,8)=R(p)G(8),这里,关于角度的函数G(69是一个以2n弧度为周期的连续函数,并且满足当坐标系旋转a角度之后,其形式不发生改变,
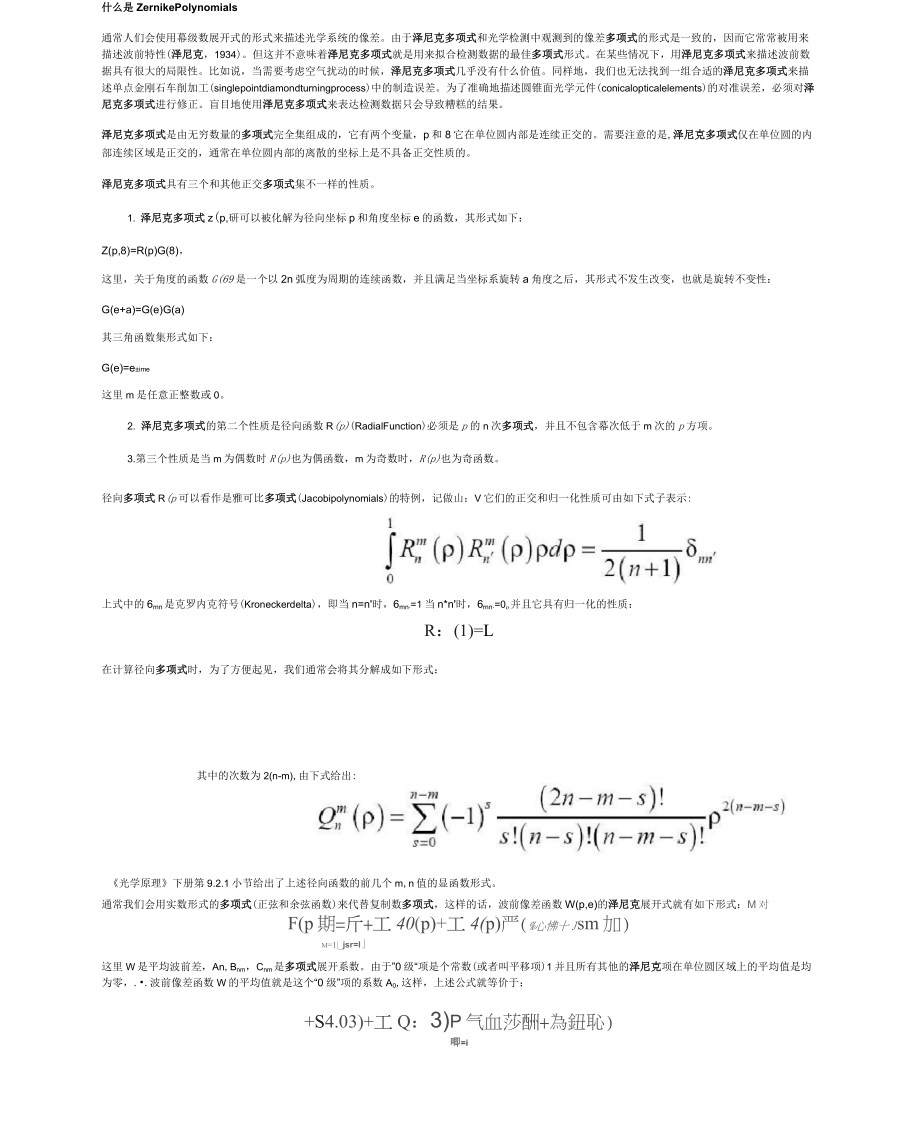
3、也就是旋转不变性:G(e+a)=G(e)G(a)其三角函数集形式如下:G(e)=eime这里m是任意正整数或0。2. 泽尼克多项式的第二个性质是径向函数R(p)(RadialFunction)必须是p的n次多项式,并且不包含幕次低于m次的p方项。3.第三个性质是当m为偶数时R(p)也为偶函数,m为奇数时,R(p)也为奇函数。径向多项式R(p可以看作是雅可比多项式(Jacobipolynomials)的特例,记做山;V它们的正交和归一化性质可由如下式子表示:上式中的6mn是克罗内克符号(Kroneckerdelta),即当n=n时,6mn.=1当n*n时,6mn.=0o并且它具有归一化的性质:R
4、:(1)=L在计算径向多项式时,为了方便起见,我们通常会将其分解成如下形式:其中的次数为2(n-m),由下式给出:光学原理下册第9.2.1小节给出了上述径向函数的前几个m,n值的显函数形式。通常我们会用实数形式的多项式(正弦和余弦函数)来代替复制数多项式,这样的话,波前像差函数W(p,e)的泽尼克展开式就有如下形式:M对F(p期=斤+工40(p)+工4(p)严(%心怫十Jsm加)m=1|_jsr=l这里W是平均波前差,An,Bnm,Cnm是多项式展开系数。由于”0级“项是个常数(或者叫平移项)1并且所有其他的泽尼克项在单位圆区域上的平均值是均为零,.波前像差函数W的平均值就是这个“0级”项的系
5、数A0,这样,上述公式就等价于:+S4.03)+工Q:3)p气血莎酬+為鈕恥)唧=i对于一个回转对称的光学系统来说,物体位于子午面内,因而波前像差相对于yz面是对称的,也就是只有e的偶函数(余弦项)项是非零项。对于一般情况,波前是不对称的,因而也就是同时包含两种三角函数形式。泽尼克项下面给出了48项泽尼克多项式,外加一项常数项。需要注意的是,读者并不需要严格按照下文所示的顺序排列这泽尼克项,实际上在不同的应用和机构会采用不同的排列顺序。表中的#0项是个常数或者说是平移项(pistonterm),这一项的系数也代表了平均光程差;而#1和#2项分别是x和y方向的倾斜项(tiltterms),#3代
6、表了聚焦,因此,#1到#3项代表了波前的高斯或者近轴特性;#4和#5项代表了像散和离焦,#6和#7项代表彗差和倾斜,而#8项代表了3级像差和离焦,也就是说#4到#8项为3级相差项;同样地,#9到#15项代表了5级像差,而#16到#24项代表了7级像差,#25到#35项代表了9级像差,#36到#48项代表了11级像差。2.1极坐标形式的泽尼克多项式2.1笛卡尔坐标系下的泽尼克多项式2.1OSC泽尼克多项式很多早期的用泽尼克多项式来对干涉图样做计算机分析的工作,是在上个世纪七十年代,由亚利桑那大学光学科学中心(OSC,OpticalSciencesCente)的JohnLoomis进行的。OSC泽
7、尼克多项式采用了n从1到5,以及n=6,m=0的项。n=m=0的常数项(pistonterm)也用来做干涉图样分析,但是这一项并不包含在泽尼克多项式中。因此,OSC泽尼克多项式包含36项,外加一项平移项(pistonterm)。这也是在光学设计软件OSLO和CodeV中采用的形式。泽尼克多项式的图形1-n=16,m=0时的泽尼克多项式的三维图2-像散:2x2-ay2,其中aw(-4,4)3-彗差:2p2X+ax,其中a(-5,3);2p2X+ay,其中a(-4,4)4.球差和离焦:p2(2p2+1.3a),其中aw(-5,3)5.前36个泽尼克多项式ZL1111泽尼克多项式常用于干涉测试,而光
8、学设计人员用的更多的则是赛德尔像差多项式。泽尼克多项式和赛德尔像差波前的初级和3级像差系数可以用泽尼克多项式来表示。我们将波前函数用泽尼克项的Z。Z8这九项来表示成如下形式:=70+Zypcoe1+&+Z3(2/)2一1)tZp2cos+Zp2sin20fZ6(3p2一2)pcos&+Z7(3p22)psin这些泽尼克项和像差的对应关系见表四。表四:前9个泽尼克项和像差的对应关系Z0平移(piston)Z1x轴倾斜Z2y轴倾斜Z3离焦Z4像散0&离焦Z5像散45&离焦Z6彗差&x轴倾斜Z7彗差&y轴倾斜球差&离焦继续将上述波前函数改写成如下形式:w(p,e)=w11cose+w20p2+W40
9、p4+W31p3cose+W22p2cos2e由于这些泽尼克项中与视场无关,它们并非真正的赛德尔像差。用干涉测试的方法智能得到单个视场点的波前数据。这使得场曲看上去像离焦,而畸变看上去像倾斜。因此,要得到赛德尔像差,就必须测量一定数量的视场点。我们可以按照初级和3级像差的形式继续改写上述波前函数,也就是合并同类项,并用波前相差系数做等价替换,结果如下:W(p,e)=z0-Z3+Z8平移(Piston)+(Z1-2Z6)pcose+(Z2-2Z7)psine倾斜(Tilt)+(2Z3-6Z8+Z4cos2e+Z5sin2e)p2离焦+像散(focus+astigmatism)+3(Z6cose+
10、Z7sine)p3彗差(coma)+6Z8p4球差(Spherical)对上式中做如下恒等变换:便可得到如下所示的视场无关的波前相差系数:D=2_為+*P/(乙xcosM一tanattisinntisiiifocusastigmatismcomaspherical表五列出了上述视场无关像差多项式的度量(Magnitude),符号和角度(Angle)。注意离焦项的符号选择原则是使得其系数的数值最小,像散符号的选取则相反。表五:用泽尼克多系数表示的3级像差注意:在计算角度值(表中的Angle)的时候,如果分母0,angleangle+180波前差的RMS值和P-V值如果波前像差可以用3级像差多项式
11、来表示的话,我们就可以很方便地用每种3级像差所反映出来的波数来描述波前像差。这种方法在仅有一种3级像差存在的情况下尤为方便。而对于更加复杂一些的波前像差,我们也可以很方便地得出其波前的P-V(peak-to-valley)值(有时候也叫做P-P值),其数值就是实际波前和理想波前之间的最大偏差,包括正向和负向两个方向。比如,如果正向的波前最大偏+0.2波长,负向最大的波前偏差为0.1波长,那么这个波前差的P-V值就是0.3波长。下述方程定义了圆形光阑下的波前差O及其方差02。AW(p,eAW(p.B-hWpdp虽然用P-V值来描述一个波前质量很简单方便,但缺容易引起误导。一个波前差的P-V值比较
12、大的光学系统的实际性能有可能会优于一个波前差的P-V值相对比较小的系统。这样,用RMS波前差来描述波前质量会更有意义一些。e)是相对于理想球面波的偏差,其单位通常为波长数。AW是平均波前光程差(OPD)。de=AW12甲尸JL62)如果将波前像差用泽尼克多项式的形式表示的话,波前差的方差就可以很简单地通过泽尼克多项式的正交关系计算出来。最终的结果(单位圆形区域)如下:2T1(63)表五给出了圆形光阑下的波前差。和平均波前像差之间的关系。公式62)可以用来计算表五中给出的值的。值。而一般的3级像差就可以通过泽尼克多项式的简单线性组合表示,然后使用公式(63)计算波前差的方差。友情链接:EDNChina电子设计技术|电子设计信息网|通信产业网|半导体国际|清华大学出版社|嵌入式在线|RFID射频快报|电子电路图站|虚拟仪器之家|凌阳教育关于我们|诚邀加盟|客户服务|相关法律|网站地图|友情链接|建议指正|服务信箱:|serviceEgFOCUS建议指正2006与非门科技(北京)有限公司AllRightsReserved.京ICP证:070212
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
