 机械创新设计小论文
机械创新设计小论文

《机械创新设计小论文》由会员分享,可在线阅读,更多相关《机械创新设计小论文(10页珍藏版)》请在装配图网上搜索。
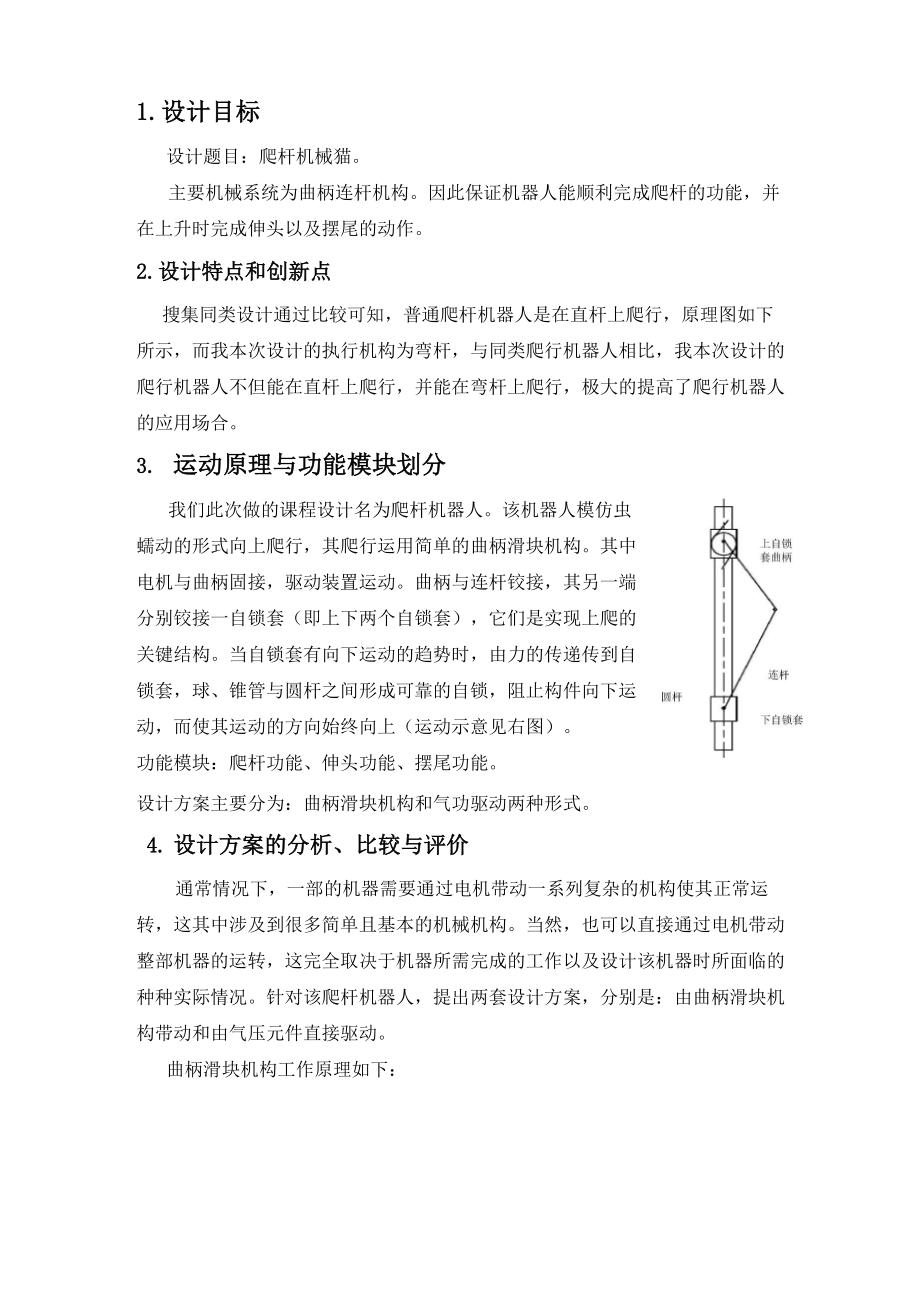
1、1.设计目标设计题目:爬杆机械猫。主要机械系统为曲柄连杆机构。因此保证机器人能顺利完成爬杆的功能,并 在上升时完成伸头以及摆尾的动作。2.设计特点和创新点搜集同类设计通过比较可知,普通爬杆机器人是在直杆上爬行,原理图如下 所示,而我本次设计的执行机构为弯杆,与同类爬行机器人相比,我本次设计的 爬行机器人不但能在直杆上爬行,并能在弯杆上爬行,极大的提高了爬行机器人 的应用场合。3. 运动原理与功能模块划分我们此次做的课程设计名为爬杆机器人。该机器人模仿虫 蠕动的形式向上爬行,其爬行运用简单的曲柄滑块机构。其中 电机与曲柄固接,驱动装置运动。曲柄与连杆铰接,其另一端 分别铰接一自锁套(即上下两个自
2、锁套),它们是实现上爬的 关键结构。当自锁套有向下运动的趋势时,由力的传递传到自 锁套,球、锥管与圆杆之间形成可靠的自锁,阻止构件向下运 动,而使其运动的方向始终向上(运动示意见右图)。 功能模块:爬杆功能、伸头功能、摆尾功能。设计方案主要分为:曲柄滑块机构和气功驱动两种形式。4. 设计方案的分析、比较与评价通常情况下,一部的机器需要通过电机带动一系列复杂的机构使其正常运 转,这其中涉及到很多简单且基本的机械机构。当然,也可以直接通过电机带动 整部机器的运转,这完全取决于机器所需完成的工作以及设计该机器时所面临的 种种实际情况。针对该爬杆机器人,提出两套设计方案,分别是:由曲柄滑块机 构带动和
3、由气压元件直接驱动。曲柄滑块机构工作原理如下:在平面连杆机构 中,能绕定轴或定点作 整周回转的构件被称 为曲柄。而通过改变平 面四杆机构中构件的 形状和运动尺寸能将 其演化为不同的机构 形式,就曲柄滑块机构 而言,它是通过增加铰 链四杆机构中摇杆的长度至无穷大而演变过来的。改机构实际上是由一曲柄一端 铰接在机架上,另一端铰接一连杆,连杆的另一端联结一滑块,在曲柄为主动件 运动时带动连杆,连杆又带动滑块,使其在平面某一范围内做直线往复运动(图 1)。其次是气动的原理:该运动原理与上述的曲柄滑块机构相比,在保留两滑块作为 自锁装置的前提下,省略了联结两滑块的传动装置,转而用两个汽缸直接带动两 个滑
4、块的上下移动。这样的设计更直接也更简洁,至于两者到底哪个更合理呢? 现在我们结合两者的利弊,着重分析一下各自的优缺点:就采用汽缸驱动而言,它形式简单、结构简便,从机械设计角度而言讲究尽 量采用基本机构,设计的机构要简单、可靠。而汽缸则融会了上述的优点,它由 驱动机构直接带动两个自锁滑块,避免了两者间的连接机构,精简了构件之间的 连接。此外,该机构具有环保等特点,它利用空气作为动力源,无污染、运动时 无噪音,而且运行速度快,可以在短时间内使机器人爬到杆的顶端,它还能够随 身携带气包作为动力源,可以做到无线操作。就采用曲柄滑块结构而言,它属于平面连杆机构,具有结构简单、制造方便、 运动副为低副,能
5、承受较大载荷;但平衡困难,不易用于高速。我们设计的机构 是由电机经减速直接驱动的,和利用气动原理相比它多了一套传动和连接机构, 但该机构运用的原理简单,设计合理,而且它不仅能在自杆上爬行,更能在弯曲 的管道外爬行,具体的示意图见下。综上所述,选取“曲柄滑块机构”作为该爬杆机器人的最终运动方案。5. 总体结构设计5.1 伸头功能的实现方案一:由凸轮机构实现方案二:由平面六杆机构实现方案三:由平面四杆机构实现伸头动力传输:齿轮 1 固连在曲柄上,由电机带动,齿轮 1 与齿轮 2 外啮合,齿轮 3 与 齿轮 2 同轴。摆尾功能实现:执行系统运动简图:自由度F的计算:n=3 Pl=4 Ph=0F=3n
6、-(2Pl+Ph)=3 X 3-(2 X 4-0)=16.结构详细设计6.1 自锁套结构图6.2 自锁套连杆运动分析如图所示,设杆I作逆时针转动,且0=0时为初始位置, 此时自锁套锁定,自锁套4向上滑动。故在00180之间, 可看成以杆 3 为曲柄,杆 2 为连杆,自锁套 4 为滑块的曲柄 滑块机构。现就这一过程作出分析:L1=50cm L2=150cm e=0 故此机构无急回特性。 Ymax=arcsin(50/150)=19.5 因为此机构并非大功率机构,故 最大压力角符合要求。下面计算曲柄转动角度和滑块位移的 关系:设a=0,s=0; a=0,s=20-L故只需求得L与cos0之间的关A
7、B AB系。cos0=(L *L-200)/10*LAB AB AB解得:cos0=L/10-20/L10L20 当1800360,自锁套4自锁AB AB AB自锁套 3 可以向上运动。此时由于压力角非常大,故曲柄不应太长, cos0 =L /10-20/L L 由 10 增加到 20cm。AB AB AB7.方案的可行性与市场前景预测该机器人运用了简单的曲柄滑块机构,原动力采用电机作为驱动,两者在选 材上都很方便,而且我们在设计时选用了材质较为轻盈的铝材作为结构材料,减 轻了该机器人的重量,使其更大效率的发挥电机的功率,提高了机器人的爬行速 度。此外,该爬杆机器人的设计方便了操作人员安装到圆
8、杆上和调试,对于在调 试过程中遇到的问题也可以根据当时的情况做出及时、相应的修改。而且,我们 设计的机器人不仅能在直杆外爬行,更能适应不同弯曲度的圆杆对我们机器人的 挑战,正是由于曲柄滑块机构的合理应用,我们的机器人才可以在提高机械运动 效率的前提下克服不同弯曲度的圆杆,使其像爬直杆一样爬行过弯曲的管道。 8.设计总结创新是一个民族进步的灵魂,是国家兴旺的不竭动力。一个国家的创新能力, 决定了它在国际竞争和世界总格局的地位,所以我国正在为创建一个国家创新体 系而努力。作为一门比较开放的学科,我抱着好奇和求知的目的,选择了这门课 程,在老师的带领下,比较完整的学完了本次课程。作为对这次课程的考察
9、,我 们需要设计一份产品。而我设计了一个爬行机器人,本次设计巧妙,在同行产品 中,一般的爬杆机器人只能沿着直杆爬行,而这次设计用最精简的结构实现了弯 杆爬杆的功能,且能实现各种灵活的动作,较适合制作为玩具。至于其他方面的 实用性,这种爬行机器人的实用性也是可以应用得非常广泛的。例如:作为工业 大国,在不久前,我们国家同俄罗斯签订 300亿美元的天然气订单,这些石油主 要靠管道运输到中国。然而,这样浩大的工程,所需管道也是一项巨大的工程。 如果靠人工来维修将是一项非常艰巨的任务,如果把这次设计进一步修改后,就 可以应用到管道维修,它发挥的作用将是不可低估的。当然,这样的机构绝非完 美无缺的。首先
10、,设计的自锁套的形状还无法适应此机构爬各种杆。若所要爬的 杆直径大小稍有变化,随着它的变化自锁套也必须相应地改变它外伸包拢杆部分 的形状大小。但是,我们设计的自锁套可以根据不同需要换取不同大小、材质的 小球。无法完成大载荷的爬杆运动;且各零件的尺寸要大小适宜。在未来,这类 的爬行机器人改进的地方主要有以下几个方面:首先,是材料的改进。设计的机器人可能会在一些恶劣环境的工作,如高温, 高辐射,高压等条件下,目前的材料还不能满足这样要求。所以,在材料这一块 还有很大的发展空间。其次,设计的全面性。以最近的探月机器人“玉兔号”为例,虽然在设计时, 综合考虑了很多的问题,也经历了大量的实验,最后成功发
11、射到月球上,但“玉 兔”号最后还是没能完成预定的目标。这次经历告诉我们,设计的产品要同实际 环境相结合,这样才能满足实用性。当然,还有其他的一些可以改进的方面,如 改进爬杆机器人使其能在管道内爬行等等。参考文献1 张春林等. 机械创新设计.北京:机械工业出版社,1999.2 廖汉元 孔建益等. 武汉:机械工业出版社,1999.肖立,佟仕忠等.爬壁机器人的现状与发展J.机器人,1999,21 (2): 148-155.4刘淑霞等.爬行机器人技术的应用J.机器人,1999,21 (2): 148-155. 张培峰等 一种多吸盘爬壁机器人机构及运动学研究 J.机器人,2007 29 (1):13-14 孟宪超等.一种多吸盘爬壁机器人原型的研究J.机械设计,2003,20(8):30-317宗光华等.机器人技术手册M.北京:科学出版社,1996.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
