 现代控制理论课程设计
现代控制理论课程设计

《现代控制理论课程设计》由会员分享,可在线阅读,更多相关《现代控制理论课程设计(11页珍藏版)》请在装配图网上搜索。
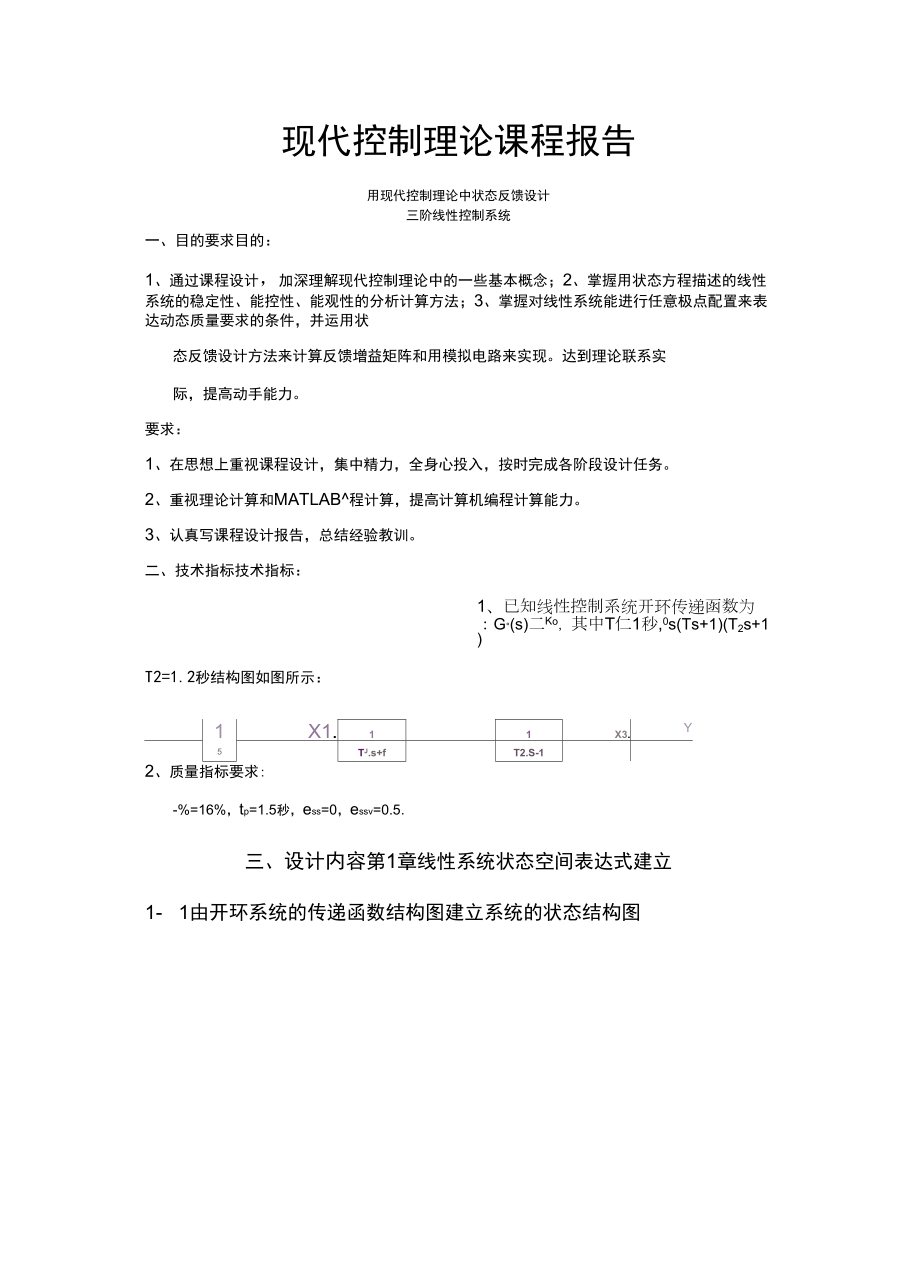
1、现代控制理论课程报告用现代控制理论中状态反馈设计三阶线性控制系统一、目的要求目的:1、通过课程设计,加深理解现代控制理论中的一些基本概念;2、掌握用状态方程描述的线性系统的稳定性、能控性、能观性的分析计算方法;3、掌握对线性系统能进行任意极点配置来表达动态质量要求的条件,并运用状态反馈设计方法来计算反馈增益矩阵和用模拟电路来实现。达到理论联系实际,提高动手能力。要求:1、在思想上重视课程设计,集中精力,全身心投入,按时完成各阶段设计任务。2、重视理论计算和MATLAB程计算,提高计算机编程计算能力。3、认真写课程设计报告,总结经验教训。二、技术指标技术指标:1、已知线性控制系统开环传递函数为:
2、G(s)二Ko,其中T仁1秒,0s(Ts+1)(T2s+1)T2=1.2秒结构图如图所示:1X1.11X3.Y5TJ.s+fT2.S-12、质量指标要求:-%=16%,tp=1.5秒,ess=0,essv=0.5.三、设计内容第1章线性系统状态空间表达式建立1- 1由开环系统的传递函数结构图建立系统的状态结构图将原结构图结构变换后,得:2由状态结构图写出状态空间表达式由变换后的结构图可得:X=u1x2x1-x2=x一x2T111x3X2-X3x2-x3=0.83x2-0.83x3y二=人即可得出系统的状态空间方程和输出方程:x二AxBy=CxD0其中,A=100o1可-1o,B=0,C=Ioo
3、1】,D=o0.83-0.83一卫_第2章理论分析计算系统的性能1稳定性分析方法与结论判别方法一:线性系统用李雅普诺夫稳定性判据分析稳定性时,系统矩阵A必须是非奇异常数矩阵,且系统仅存在唯一的平衡状态Xe=0。oo而所给的系统矩阵A=1-100.83010为奇异常数矩阵,所以系统不稳定-0.83判别方法二:2- 1*1*1由传递函数:G(s)=ss11.2s1,可以知道有一个极点在原点处,则系统是临界稳定的,临界稳定即就是系统是不稳定的Qc=BABA2BrankQc=3=n2能控性与能观测性分析方法与结论C1f0011CA=00.83-0.8310.83-1.530.69_所以,系统能控。所以
4、,系统能观测。rankQo=3=nQo-01010【0-10.83闭环系统的极点配置1极点配置与动态质量指标关系二=16%由tp=COn一25S得,=0.5n=2.4,二2.09j所以,因此,系统希望主导极点3,2按主导极点的要求,非主导极点S3应满足SZ10n=12,取非主导极点-12Si=-1.2-2.09g=-1.22.09综上,系统极点为弋=一122极点配置的结果(闭环特征多项式)由极点可得,期望的闭环特征多项式为f(;)=(s-s卜(s-$(s-S3)二s1.22.09js1.2-2.09js12二s3-14.4s234.61s69.72第4章由状态反馈实现极点配置1- 1通过状态反
5、馈可任意配置极点的条件线性定常受控系统a0A,B,C通过状态反馈可以任意配置其闭环极点的充要条件是原开环系统a0A,B,C状态完全能控2状态反馈增益阵的计算设状态反馈阵为K=kk2k3l则由状态方程可得,闭环特征多项式为s+匕-1=siA+BKk2s1k30032=s1.83k1s0.831.83佥k2s0.83k,k2k3令fs汀fs,可得:-0.83s+0.831.83+匕=14.40.831.83kk2=34.61解得:0.83k,k2k3=69.72K=12.57k2=10.73k3=59.64所以,闭环系统的传递函数为=69.72(s)s3+14.4s2+34.61s+69.72为检
6、验稳态误差的要求,可求得与原系统相对应的开环传递函数为69.72ss2-14.4s34.61Gs由此可求得速度误差系数呼论签294从而求得速度稳态误差essv10.5,刚好满足essv乞0.5的要求。kv故现取Rs書32s+14.4s+34.61s误差传递函数es=1一s二二厂大传递函数esss3-14.4s234.61s69.72s314.4s234.61sr。34.61爼宀叫es&-s314.4s234.61s69.72厂航0.534.61所以,r。=0.50.248269.721故为精确满足系统要求,应在系统最左端添加放大系数K,-20.5即新系统的状态空间向量为0002A=-10,B=
7、0,C=00-,D=000.83-0.830则由此可得,新的闭环特征多项式为s2k)2k22k3si-ABK0.83s+0.8332=s1.832k1s0.833.67k12k2s1.67匕k2k3483+2匕=14.40.83+3.67匕+2k2=34.61解得:k2=5.371.67k1k2k3=69.72k3=30.179第5章用MATLAB程研究状态空间表达式描述的线性系统3- 1由传递函数结构图建立状态空间表达式空间表达式为:38aO1O-123一XXXO-J-1oO-J_1o-y2由状态空间表达式分析稳定性、能控性、能观测性程序:clcA=000;1-10;05/6-5/6;B=1
8、;0;0;C=001;D=0;G=ss(A,B,C,D);Qc=ctrb(A,B)rank_Qc=rank(Qc)ifrank_Qc3disp(系统不可控!)elsedisp(系统可控!)endQo=obsv(A,C)rank_Qo=rank(Qo)ifrank_Qo3disp(系统不可观!)elsedisp(系统可观!)end运行结果:Qc=1.00000001.0000-1.0000000.8333Qo=001.000000.8333-0.83330.8333-1.52780.6944rank_Qc=3rank_Qo=3系统可控!系统可观!5-3根据极点配置要求,确定反馈增益阵求极点:程序
9、:G=tf(num,den)num=5.76;den=12.45.76;z,p,k=tf2zp(num,den)z=Emptymatrix:0-by-1运行结果:Transferfunction:5.76p=-1.2000+2.0785i-1.2000-2.0785isA2+2.4s+5.76k=5.7600因此,所求极点为p=-1.2000+2.0785i-1.2000-2.0785i求状态反馈增益阵K程序:A=000;1-10;05/6-5/6;B=1;0;0;P=-1.2000+2.0785i,-1.2000-2.0785i,-12;acker(A,B,P)运行结果:ans=12.566
10、710.687959.6917对新的状态方程判断能控能观测性:程序:clcA=000;1-10;05/6-5/6;B=2;0;0;C=001;D=0;G=ss(A,B,C,D);Qc=ctrb(A,B)rank_Qc=rank(Qc)ifrank_Qc3disp(系统不可控!)运行结果:Qc=2.00000002.0000-2.0000001.6667rank_Qc=3系统可控!elsedisp(系统可控!)endQo=obsv(A,C)rank_Qo=rank(Qo)ifrank_Qo11ScopeGiiinO*&ain4$din7Gain2GainB第6章用模拟电路实现三阶线性系统2- 1
11、系统模拟电路图100k300k2各运算放大电路的电阻、电容值的确定R0=7.17kR仁69.72500_500K359.64A1中:=8.39kR2=50050046.59kK210.73500500R3=39.77kK112.57A2中:B中的系数=仁皿100kA5中:积分环节,T=1=500k*2u=1sA3中:100k一阶惯性环节,T1=100k*1u=1s,K1=1100kA6中:一阶惯性环节,T2=300k*4u=1.2s,K仁300k=1300kA4中:是纯反相比例环节6-3模拟实验结果及参数的修改模拟实验结果:四、课程设计小结1、收获通过本次实训,让我对现代控制理论的基础知识有了
12、更进一步的掌握,熟练的运用了理论知识判断系统的能控性和能观性,同时巩固了如何判断系统的稳定性,如何求反馈增益阵K同时在实验中对MATLAB勺应用也有了回顾,如何编程实现对系统能控性和能观性的判断以及求反馈增益阵K;同时在Simulink中对系统进行仿真有了更深的了解和运用。最后是模拟电路的设计,以及实验连线,这就又对模拟电路的知识有了系统的复习。总之,通过本次实训,让我体会到将知识融会贯通的重要性,和实践的重要性等。2、经验教训与建议这次的实训让我对本专业的知识有了明确的认识,同时也发现了在这次实训中自己的不足之处,像对模拟电路的基础知识的理解不够透彻,从而导致了在电路接线过程中自己的实践能力很薄弱。因此,通过本次实训的教训,在以后的学习中一定要注意,不能只注重当时学科的重要性,还要对以前的知识加以复习和运用,提高自己的实践动手能力,这样才会是一名合格的自动化专业的学生。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
