 飞行力学基础
飞行力学基础

《飞行力学基础》由会员分享,可在线阅读,更多相关《飞行力学基础(31页珍藏版)》请在装配图网上搜索。
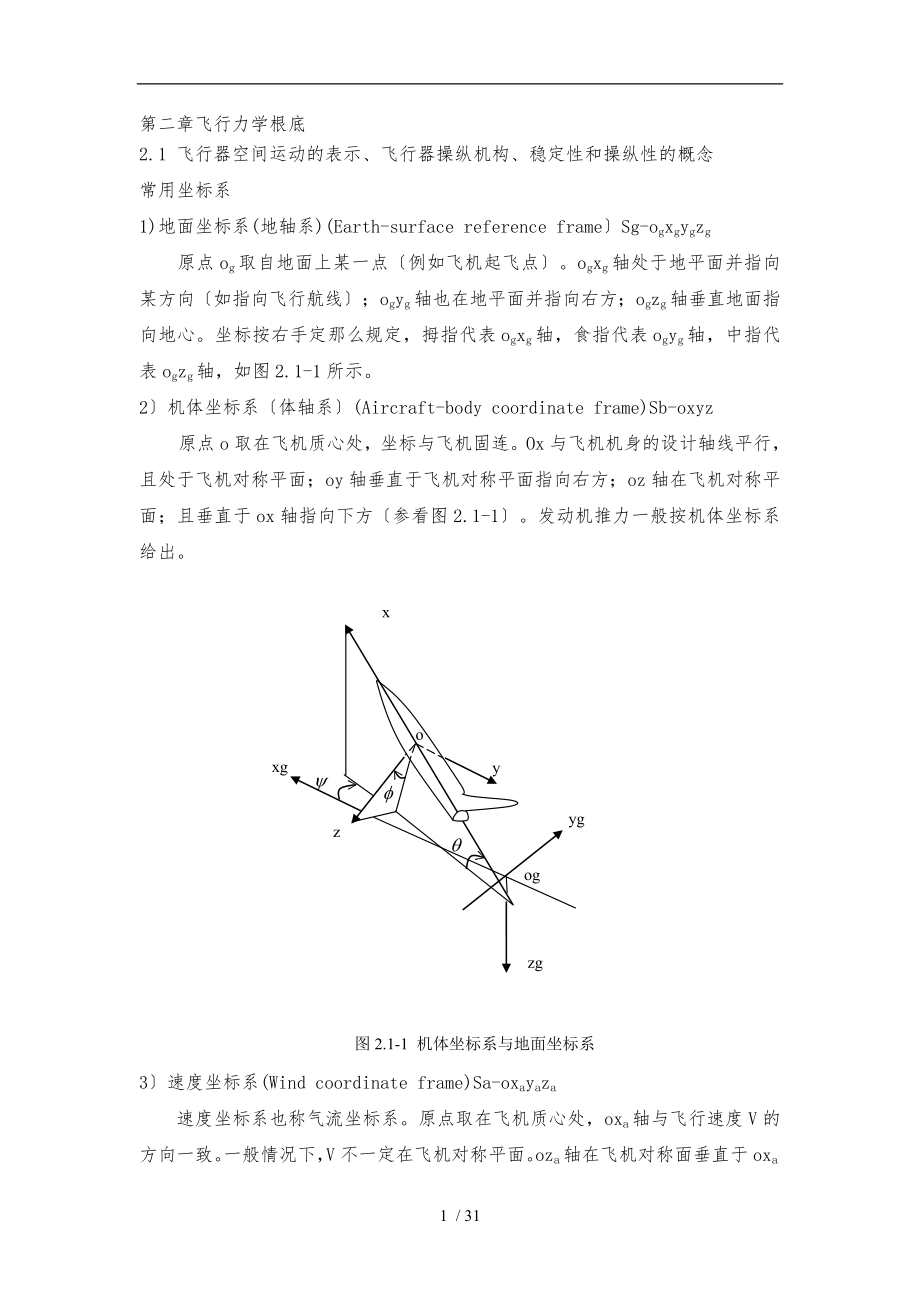
1、 第二章飞行力学根底2.1 飞行器空间运动的表示、飞行器操纵机构、稳定性和操纵性的概念常用坐标系1)地面坐标系(地轴系)(Earth-surface reference frameSg-ogxgygzg原点og取自地面上某一点例如飞机起飞点。ogxg轴处于地平面并指向某方向如指向飞行航线;ogyg轴也在地平面并指向右方;ogzg轴垂直地面指向地心。坐标按右手定那么规定,拇指代表ogxg轴,食指代表ogyg轴,中指代表ogzg轴,如图2.1-1所示。2机体坐标系体轴系(Aircraft-body coordinate frame)Sb-oxyz原点o取在飞机质心处,坐标与飞机固连。Ox与飞机机身
2、的设计轴线平行,且处于飞机对称平面;oy轴垂直于飞机对称平面指向右方;oz轴在飞机对称平面;且垂直于ox轴指向下方参看图2.1-1。发动机推力一般按机体坐标系给出。图2.1-1 机体坐标系与地面坐标系xyzoygzgxgog3速度坐标系(Wind coordinate frame)Sa-oxayaza速度坐标系也称气流坐标系。原点取在飞机质心处,oxa轴与飞行速度V的方向一致。一般情况下,V不一定在飞机对称平面。oza轴在飞机对称面垂直于oxa轴指向机腹。oya轴垂直于xaoza轴平面指向右方,如图2.1-2所示。作用在飞机上的气动力一般按速度坐标系给出。xayazaoygzgxgog图2.1
3、-2 速度坐标系与地面坐标系4航迹坐标系(Path coordinate frame)Sk-oxkykzk原点取在飞机质心处,oxk轴与飞机速度V的方向一致。ozk轴在包含oxk轴的铅垂面,向下为正;oyk轴垂直于xkozk轴平面指向右方。研究飞行器的飞行轨迹时,采用航迹坐标系可使运动方程形式较简单。 飞机的运动参数1飞机的姿态角1.俯仰角(Pitch angle)机体轴ox与地平面间的夹角。以抬头为正。2.偏航角(Yaw angle)机体轴ox在地平面上的投影与地轴ogxg间的夹角。以机头右偏航为正。3.滚转角(Roll angle)又称倾斜角,指机体轴oz与通过ox轴的铅垂面间的夹角。飞机
4、向右倾斜时为正。2) 速度轴系与地面轴系的关系以下三个角度表示速度坐标系与地面坐标系的关系。1.航迹倾斜角飞行速度矢量与地平面间的夹角,以飞机向上飞时的为正。2. 航迹方位角飞行速度矢量在地平面上的投影与ogxg间的夹角,以速度在地面的投影在ogxg之右为正。3. 航迹滚转角速度轴oza与包含oxa轴的铅垂面间的夹角。飞机向右倾斜时为正。3) 速度向量与机体轴系的关系1.迎角 (Angle of attack)速度向量V在飞机对称面上的投影与机体轴ox轴的夹角。以V的投影在轴之下为正,如图2.1-3所示。图2.1-3 迎角与侧滑角2. 侧滑角(Sideslip angle)速度向量V与飞机对称
5、面的夹角。以速度V处于对称面之右时为正。3)机体坐标系的速度分量飞行速度V在机体坐标系三个轴上的分量分别为、和在滚动轴上的分量:在俯仰轴上的分量:在偏航轴上的分量:迎角和侧滑角可以用速度分量定义 2.1-1 2.1-2其中如果迎角和侧滑角很小15,那么式2.1-1和式2.1-2可以近似为 2.1-3 2.1-4其中和的单位为弧度rad。4)机体坐标系的角速度分量机体坐标系相对于地面坐标系的转动角速度沿机体坐标系各轴的分量分别为、和滚动角速度:与机体坐标轴一致;俯仰角速度:与机体坐标轴一致;偏航角速度:与机体坐标轴一致。飞行器的三个线运动和三个转动构成了飞行器的六自由度运动。 飞行器的操纵机构飞
6、机的运动通常利用升降舵、方向舵、副翼与油门杆来控制。升降舵Elevator偏转角用表示,规定升降舵后缘下偏为正。的正向偏转产生的俯仰力矩为负值,即低头力矩。副翼(Ailerons)偏转角用表示,规定右副翼后缘下偏左副翼随同上偏为正。正向偏转产生的滚转力矩为负值。方向舵(Rudder)偏转角用表示,规定方向舵后缘向左偏转为正。正向偏转产生的偏航力矩为负值。驾驶员通过驾驶杆、脚蹬和操纵杆操纵舵面。规定驾驶杆前推位移为正此时亦为正;左倾位移此时亦为正;左脚蹬向前位移为正此时亦为正。油门(Throttle)杆前推为正,对应加大油门从而加大发动机推力。反之为负,即收油门,减小推力。稳定性和操纵性的概念稳
7、定性是平衡状态的性质,为了讨论稳定性我们首先定义什么是平衡。如果一架飞机保持稳定的匀速飞行,那么合力以绕质心的合力矩都等于零。满足这要求的飞机就是说它在平衡状态下或者飞行在平衡条件下。相反,如果力和力矩的总和不为零,那么飞机将会经历平移和旋转加速。飞行器的稳定性是指飞行器在飞行过程中,由于受到某种干扰,是其偏离了原来的飞行状态,当干扰消失之后,飞行器能够恢复到原来飞行状态的能力。这种扰动可能来自于大气的现象、发动机推力改变、或驾驶员的偶然操纵等。假设飞行器可以恢复到原来的飞行状态,就称它是稳定的,或称之为具有稳定性;假设扰动后的运动越来越偏离原来的飞行状态,称它是不稳定的;假设扰动后的运动既不
8、恢复也不远离原来的运动,称为中立稳定。一架飞机只有是足够稳定的,驾驶员才不会感觉很疲劳,因为不稳定的飞机是驾驶员必须不停地操纵飞机以便应付外界的扰动。虽然本身在空气动力上不太稳定或不稳定的飞机可以飞行,但是不够平安,除非增加机电设备以提供人工的稳定性,这种设备称为增稳系统。一般所说的飞行器的稳定性,实际上包含两方面的含意。一是指飞行器包括稳定自动器的稳定性;另一方面是指飞行器自身不包括稳定自动器的稳定性。飞机稳定的稳定一般分为静态稳定和动态稳定,静态稳定性是指飞机受到扰动后返回到其初始平衡状态的趋势。飞行器自身的稳定性,也称飞行器静稳定性,它是指飞行器受到扰动后返回到初始平衡状态的趋势。它与飞
9、行器的气动外形和布局有关。包括:(1)纵向静稳定性,是指飞机围绕y轴的稳定性;当飞行器在作平衡飞行时,假设有一个外力干扰,是它的迎角增大,干扰消除后,靠飞机本身气动特性驾驶员不偏转舵面,产生一个恢复力矩试图使飞机恢复到原来的平衡状态。经过理论推导和实验发现只要保证气动力焦点在质心之后,并有一定的距离,就可以保证迎角是稳定的。2方向静稳定性。方向静稳定性是指飞机绕轴的静稳定性。当飞行受到偏航扰动时,飞行器有自动返回到平衡状态的趋势。由于飞机具有方向静稳定性,飞机总是指向相对风的方向,所以也称风向标稳定性。3滚动静稳定性。当一架飞机受到扰动,偏离水平状态,发生了倾斜,飞行器能靠自身的气动特性产生恢
10、复力矩试图使其恢复到水平状态。在动态稳定性的研究中,我们关心飞机在受到干扰,偏离平衡点之后,运动的历史过程。注意静态稳定不能保证动态稳定。飞机的操纵性所包含的容较多。如要求操纵简单、省力、符合驾驶员的生理习惯,操纵力和操纵机构位移适合,以与飞机对驾驶员操纵反响时差要适当等。从操纵的功用来说,所谓操纵性是指:飞机能按照驾驶员的操纵意图,以一定的运动过程改变飞行方向或姿态。因此操纵性是飞机改变飞行状态的能力。,2.2空气动力与力矩空气动力在气流坐标系的分解总的空气动力沿气流坐标系各轴的分量分别为,通常用D和L分别表示阻力和升力,于是有,。空气动力学常采用无因次气动力系数形式,其定义如下:阻力系数沿
11、的分量,阻力系数向后为正侧力系数沿的分量,侧力系数向右为正升力系数沿的分量,向上为正总的空气动力矩在机体坐标系的分解机体转动惯量是以机体坐标系来定义的,所以合力矩矢量沿机体轴分解成L,M,N。无因次力矩系数定义如下:绕轴的滚转力矩系数绕轴的俯仰力矩系数绕轴的偏航力矩系数以上各式中的是空气密度,是为空速,为机翼面积,为机翼展长,是机翼平均气动弦长。2.3纵向气动力和气动力矩2.3.1升力升力:飞机总的空气动力沿气流坐标系轴的分量,向上为正。产生升力的主要部件是飞机的机翼。1机翼的几何形状和几何参数机翼剖面见图2.3-1翼弦长:翼型前缘A到后缘B的距离。相对厚度:,为最大厚度图2.3-1机翼剖面相
12、对弯度:,为中弧线最高点至翼弦线距离。展弦比:,为机翼展长,为机翼面积。梯形比:,分别是翼尖弦长和翼根弦长翼平均空气动力弦: 2.3-1这里,表示沿机翼展向坐标处的翼弦长;前缘后掠角,如图2.3-2所示。图2.3-2 机翼平面形状1/4弦线点后掠角,如图2.3-2所示。2机翼的升力1亚声速时升力产生的机理当气流以某一迎角流过翼型时,由于翼型上外表凸起的影响,使得流管变细,即截面积S减小。根据连续方程VS=m(常数)可知,翼型上外表的流速必然增加,而下外表流速那么减小,如图2.3-3所示,根据伯努利方程常数,流速大的地方,压强将减小,反之增大。因此,翼型的上下外表将产生压力差。因此,垂直飞行速度
13、矢量的压力差的总和,就是升力。图2.3-3 翼型与气流压力系数:翼面上某点的压强与远前方自由气流的压强,同远前方自由气流的动压之比,即 2.3-2压力分布图:将翼面上各点的压力系数的数值光滑连接,假设为负值吸力那么箭头向外,假设为正值即压力箭头指向翼面,如图2.3-4所示。图2.3-4 压力分布图实验发现压力分布图是随迎角而变化的。机翼升力与机翼面积、动压成正比。其表达式为 或 非对称机翼升力系数随迎角的变化关系如图2.3-5所示。0图2.3-5 曲线升力系数是迎角的函数,越大也越大。当时。这是因为适用于低速飞行的翼型弯度总是正弯度,当时上下翼面压力差仍不为零而是正值,当为某一负值时才有。使的
14、迎角称为零升迎角,一般为负值。只有翼型对称时弯度,且上下翼面曲线对称,零升迎角才为零。当迎角到达某一值时,到达最大值,如果迎角再大下降,使的迎角称为临界迎角。在围,与呈线性关系:称为机翼升力线斜率,也称为升力迎角导数,在线性围,与的关系为: 注意为负值 2.3-32超声速时升力产生的机理超声速翼型在超音速气流中的升力形成也是由于翼面的压力差所致,图2.3-6表示超音速的流动情况。为简单起见用一平板相对厚度很薄的翼型。在迎角为正值时上翼面相当与超音速气流绕凸角膨胀流动情况,故上翼面流速加大,压力降低,而下翼面相当于流经楔形物体时的情况,是压缩流,流速变小压力提高,故上下压力差形成升力。附着在翼型
15、前缘下翼面的是激波,附着在上翼面的是膨胀波,而尾随在后缘的下翼面的是膨胀波,而尾随在上翼面的是激波,因此气流在前缘点分流后,流经上翼面的气流先于下翼面气流到达后缘点。膨胀波激波膨胀波激波图2.3-6超音速飞行时升力形成3机身的升力机身一般接近圆柱形,亚音速飞机是圆头圆尾,中段是圆柱。理论和实验都说明这类形状在迎角不大的情况下是没有升力的。只有大迎角时,机身背局部离出许多旋涡,才有些升力。超音速飞机的机身头部一般为圆锥形,有迎角时,升力就产生这圆锥形头部,而机身的圆柱段不产生升力。同机翼升力一样,在线性围机身升力可写为: 2.3-4其中,是机身的横截面积。表示机身升力线斜率,故机身的升力系数 2
16、.3-54平尾的升力水平尾翼相当于一个小机翼,但是它受到前面机翼下洗的影响。机翼有升力时,上外表的压力低于下外表,因而在左右翼尖处的端头,气流将从下外表向上外表翻卷,然后随迎面气流拖出两条旋涡,称为翼尖尾涡。旋涡将带动周围空气旋转,称为诱导速度场,或称为洗流。水平尾翼处于两条旋涡之间,机翼是正升力时,旋涡对平尾处的气流造成向下的洗流速度。因此,迎面的气流流到平尾处就改变方向。如果远前方气流与平尾翼弦线的迎角是,如图2.3-7所示,且有下洗速度,那么气流向下偏转一个角度,称为下洗角。 2.3-6水平安定面升降舵图2.3-7 下洗角假设机翼弦线与平尾弦线平行,那么是机翼迎角。机翼对平尾的下洗角与机
17、翼迎角成正比: 2.3-7式中:。机翼迎角减小一个,才是平尾的实际迎角 2.3-8平尾由两局部组成,前面的固定局部称为水平安定面,后面可转动的局部称为升降舵见图2.3-7。由于偏转升降舵改变了平尾翼型弯度,因而也改变了平尾的升力。向下偏,平尾的升力增加;向上偏,平尾的升力减小。平尾升力可由下式确定 2.3-9式中:平尾面积平尾升力系数 2.3-10超音速飞机的平尾是一个可转动的整体,称为全动式平尾。全动式平尾的升力系数为式中:为平尾转动角度,仍以后缘下偏为正。5整个飞机的升力飞机的升力为各局部升力之和假设用无因次的升力系数表示,可写为 2.3-11 2.3-12将2.3-3、2.3-5、2.3
18、-8、2.3-10等式代入式2.3-12可得 2.3-13式中:升力系数不仅与,有关,而且还与飞行数有关,即2.3-13可写为 2.3-14图2.3-8给出了随数变化的曲线。图中为临界马赫数。12图2.3-8 超音速飞机变化曲线低速飞行时根本保持不变;时,随的增加略有增高;时,增大更剧烈,但随之又降低;时,随的增加而减小。图2.3-8为一般超音速飞机随变化的典型规律。阻力飞行器在空中飞行时,将受到空气对它的阻力,为了克制阻力,就要消耗发动的功率。不但机翼会产生阻力,飞机其它暴露在气流中的各零部件如机身、起落架、尾翼等都可产生阻力。近代飞机在巡航飞行时,机翼阻力大约占总阻力的百分之二十到三十五,
19、因此,不能以机翼阻力来代表整个飞机的阻力。按产生阻力的原因来分,低速飞机上的主要阻力有:摩擦阻力、压差阻力和诱导阻力。1摩擦阻力摩擦阻力的产生是由大气的粘性产生的。因为有粘性的大气流过飞行器外表时,紧贴飞行器外表的一层气体速度为零,从飞行器外表向外,气流速度才一层比一层加大。气流速度之所以愈贴近飞行外表愈慢,这时由于空气流动受到飞行器外表摩擦作用的结果。根据作用和反作用定律,被减慢的大气必然给予飞行器外表与飞行方向相反的作用力,这就是磨擦阻力。磨擦阻力不管在低速飞行和超音速飞行时都是存在的。摩擦阻力的大小,取决于空气的粘性,飞机的外表状况以同气流接触的飞机的外表面积。2 压差阻力空气流过翼面时
20、,在翼面前缘局部受翼面阻挡,流速减慢,压强升高;在翼面后缘,由于气流别离形成涡流区,压强减小。这样翼面前后便产生压强差,形成阻力。这种由于前后压强差形成的阻力叫做压差阻力。压差阻力同物体的迎风面积、形状和在气流中的位置都有很大的关系。3 诱导阻力诱导阻力是伴随升力而产生的。如果没有升力,诱导阻力也就等于零。也许可以说它是为了产生升力而付出的一种“代价。亚音速飞行时,不仅机翼对平尾有下洗的影响,而且翼尖拖出的两条自由涡对机翼自身也产生下洗的影响,只是小于对平尾的下洗。按定义,机翼的升力的方向与流经机翼气流方向垂直,但由于洗流的产生,气流的方向改变了下洗角,所以升力也同样地偏斜角,向后偏斜角的升力
21、在飞行方向的投影将阻碍飞行器向前运动。这种阻力称为机翼的诱导阻力。诱导阻力系数的表达式为 2.3-15诱导阻力系数关系如图2.3-9所示图2.3-9 关系诱导阻力同机翼的平面形状,翼剖面形状,展弦比,特别是同升力有关。对于飞机作超音速飞行时,它上面还有波阻,这里不细说。4整个飞行器的阻力综上所述,飞机的阻力系数分为两局部,可写为 2.3-16式中:零升阻力系数升致阻力系数。在小迎角情况下,升致阻力系数与升力系数的平方成正比,阻力系数可写为 2.3-17上式说明阻力系数不仅与有关,且与数有关。图2.3-10表示迎角时的曲线。图2.3-11表示曲线关系,称为升阻极曲线。1230.020.1图2.3
22、-10 关系曲线0.040.080.120.40.8图2.3-11升阻极曲线升阻极曲线表示为了得到升力就必须付出产生一定阻力的代价,因此它表示飞机的气动效率。 纵向力矩纵向力矩是指作用于飞机的外力产生的绕机体轴的力矩。包括气动力矩和发动机推力向量因不通过飞机质心而产生的力矩,亦称俯仰力矩。空气动力引起的俯仰力矩起决于飞行速度、高度、迎角与升降舵偏角。此外,当飞机的俯仰速率,迎角变化率,以与升降舵偏转速率等不为零时,还会产生附加俯仰力矩,称为动态气动力矩。气动俯仰力矩可写为 2.3-17也可用力矩系数表示 2.3-18其中:机翼面积;机翼平均气动弦。当迎角增加时,其增量升力就作用在焦点上,故焦点
23、又可以解释成增量升力的作用点。1定常直线飞行时的俯仰力矩1纵向定常直线飞行纵向定常直线飞行是指飞行速度向量所在的铅垂平面与飞机的纵向对称平面重合,飞行航线是一条直线,航线上各点的速度始终不变的一种飞行状态。在此飞行状态下,可近似认为,这样,纵向力矩就只是与飞行速度、高度、迎角和升降舵偏转角有关。2阻力对俯仰力矩的影响严格地讲,阻力也会对俯仰力矩有影响,但一般阻力的作用线接近飞机的重心,故可以忽略,飞机的俯仰力矩主要由升力引起。3飞机各部件的升力上面已讨论过飞机各部件的升力之和为 2.3-19其相应的升力系数为 2.3-20定常直线飞行时的俯仰力矩主要有:机翼产生的俯俯仰力矩,机身产生的俯俯仰力
24、矩,与平尾产生的俯仰力矩。俯仰力矩系数:2.3-212飞机纵向的平衡与操纵以迎角为横坐标,为参变量,将画成一族区线如图2.3-12。1050-10-15图2.3-12 关系曲线飞机作等速直线平飞,除了满足升力=重力L=G,以与推力=阻力T=D以外,还应满足对质心的力矩M=0。因此必须选择一个迎角,使之具有一定数值的,以使L=G。为使M=0即,必须偏转相应的升降舵偏角。满足力和力矩的平衡条件之后,剩下的问题是否维持这种平衡。设飞机在的曲线上的处平衡,如果因风的扰动使,负的将产生低头力矩,使自动减小,反之,在,负的将产生抬头力矩使增大。因此,为负时能使飞机的平衡具有稳定的性质,称为静稳定平衡。如果
25、如图2.3-12中的虚线所示即为正值,那么当时有正的抬头力矩使继续增大,当时有负的低头力矩使继续减小。这种维持不住的平衡,称为静不稳定平衡。的符号决定飞机平衡是否稳定,故称为静稳定性导数。总之,要使飞机具有纵向静稳定性,应为负值,即飞机质心位置必须在全机焦点之前。假设想以小于原飞行速度的速度飞行,那么驾驶员在减小油门用以减小发动机推力时还要拉驾驶杆,使升降舵上偏负向偏舵,如图2.3-12中由偏到,产生一个正的抬头力矩使迎角增大。迎角增大那么升力系数增大,如此才能到达较小速度下的升力与重力平衡。随着迎角的增大抬头力矩逐渐减小,最终自动稳定地平衡到较大的迎角上如图2.3-12中的迎角由此可见,具有
26、静稳定的飞机操纵起来是协调的,而在静不稳定情况下驾驶员要维持平衡十分困难,且操纵起来也不协调。3总的俯仰力矩假设飞机的俯仰速率,迎角变化率,以与升降舵偏转速率等不为零时,还会产生附加俯仰力矩,因此,飞机俯仰力矩可用系数形式表示为 2.3-22其中,静气动导数;,动气动导数。这些导数也是飞行马赫数M的非线性函数。2.4横侧向气动力和气动力矩侧力飞机总气动力沿气流坐标系轴的分量,向右为正。侧力可表示为 2.4-1式中:为侧力系数,为机翼参考面积。实际上侧力与机翼面积并没有关系,之所以引入机翼面积,只是为了得到与升力和阻力一样表达式而已。飞机外形是对称的,只有在不对称大气流作用下才会有侧力。以下分别
27、讨论由侧滑角,偏转方向舵,以与绕轴的滚转角速度和绕轴的偏航角速度等引起的侧力。1侧滑角引起的侧力飞机在会产生侧力,主要是垂尾的作用。亚音速飞机机身没有侧力。超音飞机机身的锥形头部有侧力,故超音速飞机的侧力是机头侧力与垂直尾翼侧力之和。右侧滑时角为正,此时产生的侧力为负,侧力可表示为: 2.4-2式中:为侧力导数;机翼面积当为正时,垂尾左外表的流速增加,因而压力下降,而右外表的流速减小,压力增加,出现压力差,因此就产生了负的侧向力。2偏转方向舵引起的侧力方向舵是装在立尾后缘的操纵面,用于偏航操纵。方向舵正向偏转绕轴转动,即向左偏转为正使对称的立尾剖面发生弯曲,产生正的侧向力。其表达式为2.4-3
28、式中:为方向舵侧力导数;机翼面积一般飞机的数值不大,可忽略不计。3滚转角速度引起的侧力当飞机绕机体轴的滚转角速度时,在立尾上有附加侧向速度,即立尾有局部侧滑角,因而产生侧力,可写为 2.4-4式中:;无因次滚转角速度,其中为机翼展长。一般飞机的为负值,但数值很小,可忽略不计。4偏航角速度引起的侧力当飞机绕机体轴的偏航角速度时,在立尾上有局部侧滑角,因而产生侧力,另外,超音速飞机的机身头部在时也产生侧力。与立尾产生的侧力相反,由引起的侧力为立尾与机身头部侧力之差。引起的全机侧力可写为 2.4-5式中:;无因次偏航角速度,其中为机翼展长。一般飞机的偏航角速度的数值很小,可忽略不计。滚转力矩与偏航力
29、矩绕机体轴轴的力矩称为滚转力矩,绕机体轴轴的力矩称为偏航力矩,这两种力矩统称为侧向力矩。下面将侧向力矩分成两组,分别说明其成因与性质。A绕机体轴轴的滚转力矩包括:1 侧滑角引起的2 偏转副翼引起的3偏转方向舵引起的4滚转角速度引起的5偏航角速度引起的B绕机体轴轴的偏航力矩包括:1 侧滑角引起的2 偏转副翼引起的3偏转方向舵引起的4滚转角速度引起的5偏航角速度引起的 绕机体轴轴的滚转力矩1侧滑角引起的此力矩主要由机翼和立尾产生,表示为 2.4-6式中:横滚静稳定性导数;为滚转力矩系数;为机翼面积;为机翼展长。1机翼上下反角的作用机翼的上下反角是指左右两半机翼的弦平面不在同一平面上,经翼根弦作一平
30、面,垂直于飞机对称面,此平面与翼弦平面的夹角即上下反角。翼弦平面在此平面之上称为上反角,反之那么称为下反角。当时见图2.4-1,相对空速可分解为平行于飞机对称面的分速和垂直于飞机对称面即平行于机体轴轴的分速。在再将分解成平行于翼弦平面的分速和垂直翼弦平面的分速,分速对左右两半机翼起了相反的作用。对右翼,这一分速从下向上,因而增加了迎角,使右翼升力增加。对左翼,这一分速从上向下,因而减小了迎角,使左翼升力减小。右大左小的升力形成的绕分速轴的滚转力矩为负值,也就是气动导数为负。反之,假设是下反角,那么为正。图2.4-1 机翼上反角2机翼后掠角的作用有大后掠角的箭形机翼,原本是为了提高临界马赫数的,
31、但同时却对产生了巨大影响。后掠角的定义是:在翼弦平面上把各翼弦线上25%的点连成直线,称为1/4弦线,此直线与机体轴轴间的夹角称为后掠角,一般翼尖向后掠故称为后掠角。由图2.4-2可知,当时,将速度在左右两半翼作如下的分解:右翼:平行于1/4弦线的分速度为 垂直于1/4弦线的分速度为左翼:平行于1/4弦线的分速度为 垂直于1/4弦线的分速度为图2.4-2 机翼后掠角的作用 垂直于1/4弦线的分速称为有效分速即产生升力有作用的分速。显然有:即右翼的有效分速大于左翼。这使得右翼上的升力大于左翼,因而形成的滚转力矩为负值,即后掠翼的为负。也可看成时,右翼的实际后掠角为,左翼的实际后掠角为。同一迎角下
32、,实际后掠角愈大那么升力愈小,故右翼的升力大于左翼。3立尾的作用当时立尾上有侧力,此侧力对取矩即为滚转力矩。立尾在之上时负向增加;立尾在之下时正向增加;4机翼机身气动干扰的作用由图2.4-3表示时,上单翼飞机翼-身连接处的右侧,因气流受阻使压力增大,左侧气流因别离旋涡而使压力降低。绕流机身的气流使靠近机身右翼根部的迎角增加,左翼根部的迎角减小,两种因素都产生负滚转力矩。因此上单翼飞机负向增加。反之,下单翼飞机正向增加。中单翼飞机的此项气流干扰效果很小,可忽略不计。右左图2.4-3 上单翼的气动干扰全机的为上述各项作用的总和,称为飞机横滚静稳定性导数。为负值时飞机具有横滚静稳定性;为正值时那么横
33、滚静不稳定。横滚静稳定性的意义如下:图2.4-4表示飞机飞行方向从纸面垂直向上。设因某种干扰使飞机有一滚转角图中为正。我们知道,仅有姿态角的变化是不会产生气动力的。但是滚转角使升力倾斜,升力与重力的合力作用使飞机向右侧滑,侧滑角。由于为负值,因此产生负的滚动力矩,可能使滚转角恢复到零。因此称为负值时飞机具有横滚静稳定性。GLGL图2.4-4 飞机自动纠正倾斜角的过程2副翼偏转角引起的滚转控制力矩副翼正偏转时右翼后缘下偏,同时左翼后缘上偏,右翼升力增大,左翼升力减小,产生的滚转力矩为负值,故为负,可写为 2.4-7式中:滚转操纵导数;为副翼偏转角。3方向舵偏转角引起的操纵穿插力矩方向舵正偏转方向
34、舵后缘向左偏转时,产生正的侧力。由于方向舵在机身之上,此侧力对轴取得正的滚转力矩。可写为 2.4-8式中:操纵穿插导数;为方向舵偏转角。4滚转角速度引起的滚转阻尼力矩滚转阻尼力矩主要由机翼产生,平尾对此也有影响。当飞机右滚时为正,右翼下行,左翼上行。下行翼迎角增加故升力增加,上行翼迎角减小故升力减小,形成负滚转力矩,起到了阻止滚转的作用,称为滚转阻尼力矩。平尾与立尾的作用原理一样,都是阻止滚转的作用,只是作用小于机翼。滚转阻尼力矩可写为 2.4-9式中:滚转阻尼导数;无因次滚转角速度。5偏航角速度引起的穿插动态力矩由于偏航角速度,因而左右两半翼的相对空速不同。在时见图2.4-5,左翼向前转,相
35、对空速增加,故升力增加;右翼向后转,相对空速减小,故升力减小,形成正滚转力矩。此外,时立尾的局部侧滑角为负,将产生正的侧力。由于一般立尾在机身之上,因而亦产生正滚转力矩。因此穿插动导数为正值,可写为 2.4-10式中:穿插动导数;无因次偏航角速度。升力增加图2.4-5 机翼对的作用 绕机体轴轴的偏航力矩1侧滑角引起的航向静稳定力矩由于侧滑角引起的偏航力矩又称为航向静稳定力矩。其表达式为 2.4-11式中:为航向静稳定性导数。由于侧滑角所引起的偏航力矩主要由机身和垂尾产生,一般情况下,机身产生不稳定的偏航力矩,但与垂尾相比拟而言较小。因此,下面以垂尾为例分析说明由侧滑角所引起的偏航力矩。假设飞机
36、存在右侧滑运动,即。右侧滑运动时,垂尾将产生一个负值侧力。由于垂尾在飞机重心前方,所以产生一个正的偏航力矩,并使侧滑角减小,因此,这种稳定的偏航力矩实质上只是对速度轴向起稳定作用。所以,有时也将偏航力矩称为风标稳定性力矩。综上所述,当航向静稳定性导数为正值时,即,将产生正的偏航力矩,飞机具有稳定偏航力矩;反之,当时,将产生不稳定的偏航力矩。2副翼偏转角引起的操纵穿插力矩偏转副翼原本为了操纵滚转,但却引起了偏航力矩。例如时,右副翼下偏,右翼弯度加大升力增加,同时阻力也增加。左副翼上偏,升力减小,左翼的阻力增加小于右翼,形成正偏航力矩。这一效果在大展弦比机翼上较明显,对操纵飞机转弯很不利。为尽量减
37、小不利效果,最好能变不利为有利,使时产生负的偏航力矩。通常采用差动机构,使副翼下偏角度小于上偏的角度。副翼操纵穿插力矩可表示为 2.4-12式中:副翼操纵穿插导数。3方向舵偏转角引起的航向控制力矩后缘向左偏时立尾产生正侧力,对轴取矩得负偏航力矩,可表示为 2.4-13式中:航向操纵导数,其值为负。4滚转角速度引起的穿插动态力矩由滚转角速度引起的偏航可表示为 2.4-14式中穿插动导数;无因次滚转角速度由滚转角速度引起的偏航主要由机翼和垂尾两局部产生。对于垂尾而言,当飞机向右滚转运动时,即存在正的滚转角速度,也可以认为垂尾不动,而气流以一定的速度吹向垂尾。这相当于在垂尾产生局部侧滑角,因而产生负
38、的侧力和正的偏航力矩。机翼对穿插动导数的影响较复杂。下面以迎角较小时作一讨论。设飞行器向右滚转运动,滚转角速度,飞行器右翼下行运动,有一个向下的速度增量,相当于机翼不动而气流向上吹,故右翼的迎角增加,同理左翼迎角减小。设 左右翼的迎角都是,当,有右下行翼的迎角左上行翼的迎角其中,和为右翼、左翼剖面处坐标位置,为飞行速度。由于升力垂直于气流速度,对于右机翼,迎角增大,增大的升力将前倾,在平行于x轴方向的分量,对z轴产生偏航力矩,对于左机翼那么相反,由于两机翼相反的结果产生负的偏航力矩,因此,对于机翼,穿插动导数为负。全机的为机翼和立尾的之和:5偏航角速度引起的航向阻尼力矩航向阻尼力矩主要由立尾产
39、生,机身也有一定的作用。时,前行翼的相对空速增大,使阻力增大,后退翼的相对空速减小,阻力减小,故为阻尼力矩。如,左右机翼的阻力差形成一个阻止飞行器转动的阻尼力矩。当偏航角速度,立尾将产生局部的负向侧滑角,将产生正的侧力,又由于立尾位于重心之后,所以将产生负的偏航力矩。航向阻尼力矩可表示为其中,航向阻尼导数,无因次偏航角速度。侧力和侧向力矩表达式综上所述,由气动力形成的侧力和侧向力矩表示如下:2.4-15式中:表示机翼面积;表示机翼展长。式2.4-15只计定常导数静导数和旋转准定常导数动导数,没有计与非定常导数,如等的作用。因为这些非定常导数值都很小,一般都可忽略。由式2.4-15还可看出,在三
40、个表达式中几乎每个运动参数都起作用,说明互相的交联较强。偏转副翼引起的侧力大小,故忽略不计。最后再强调两点。其一,飞机左右对称使和均为零,但纵向的和不为零。其二,所有空气动力和力矩都与飞行马赫数M有关,式2.4-15中各项气动导数都是马赫数M的非线性函数。2.5操纵面的铰链力矩铰链力矩是作用在舵面上的空气动力的合力对舵面转轴形成的力矩。如升降舵的铰链力矩表示为 2.4-16式中:铰链力矩系数;升降舵面积;升降舵几何平均弦长。舵面的空气动力的合力并不通过舵面转轴,而是有距离的。设转轴距合力的垂距是参看图2.4-6,那么铰链力矩可写成 2.4-17铰链力矩系数在平尾迎角与升降舵偏转角都不大的情况下,可表示为 2.4-18式中:与与马赫数M有关。图2.4-6 舵面铰链力矩人或舵机操纵舵面不仅要克制操纵机构的摩擦力和惯性力,而且要克制舵面的铰链力矩。随着飞行速度的提高与尺寸的加大,完全依靠人力操纵舵面已不可能,因而现代飞机上都装有电动或液压助力器。31 / 31
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
