 自卸车举升部分建模与动力学特性研究
自卸车举升部分建模与动力学特性研究

《自卸车举升部分建模与动力学特性研究》由会员分享,可在线阅读,更多相关《自卸车举升部分建模与动力学特性研究(9页珍藏版)》请在装配图网上搜索。
1、系统动力学及仿真基于键合图的某型电动轮自卸车液压系统动力学建模与特性研究王艾伦 曹旭辉(中南大学 机电工程学院 现代复杂设备设计与极端制造教育部重点实验室,*,410083)摘 要:分析了某型电动轮自卸车液压系统的工作机理,运用键合图建立其举升过程的动力学模型,并转换为状态空间方程,用MATLAB对举升过程的时域和频域特性进行了求解和分析,为液压系统设计过程中的性能分析和参数优化提供参考;运用AMESim对举升过程进行建模和分析的结果表明,基于键合图的数学模型是合理的。关键词:电动轮自卸车;键合图;建模;动力学特性several group number, then with b a, =c,
2、c is is methyl b two vertical box between of accurate size. Per-23 measurement, such as proceeds of c values are equal and equal to the design value, then the vertical installation accurate. For example a, b, and c valueswhile on horizontal vertical errors for measurement, General in iron angle code
3、 bit at measurement level points grid errors, specific method is from baseline to methyl vertical box center line distance for a, to b vertical box distance for b, list can measured9/90 前言矿用自卸车也称之为非公路运输车,是露天矿山运输的重要设备。矿用自卸车的举升系统由多级液压缸、举升控制阀和油源组成,随着矿用自卸车吨位的增加,举升过程中液压系统负载和流量都很大,对设计和制造的要求越来越高,因此对液压系统在举升
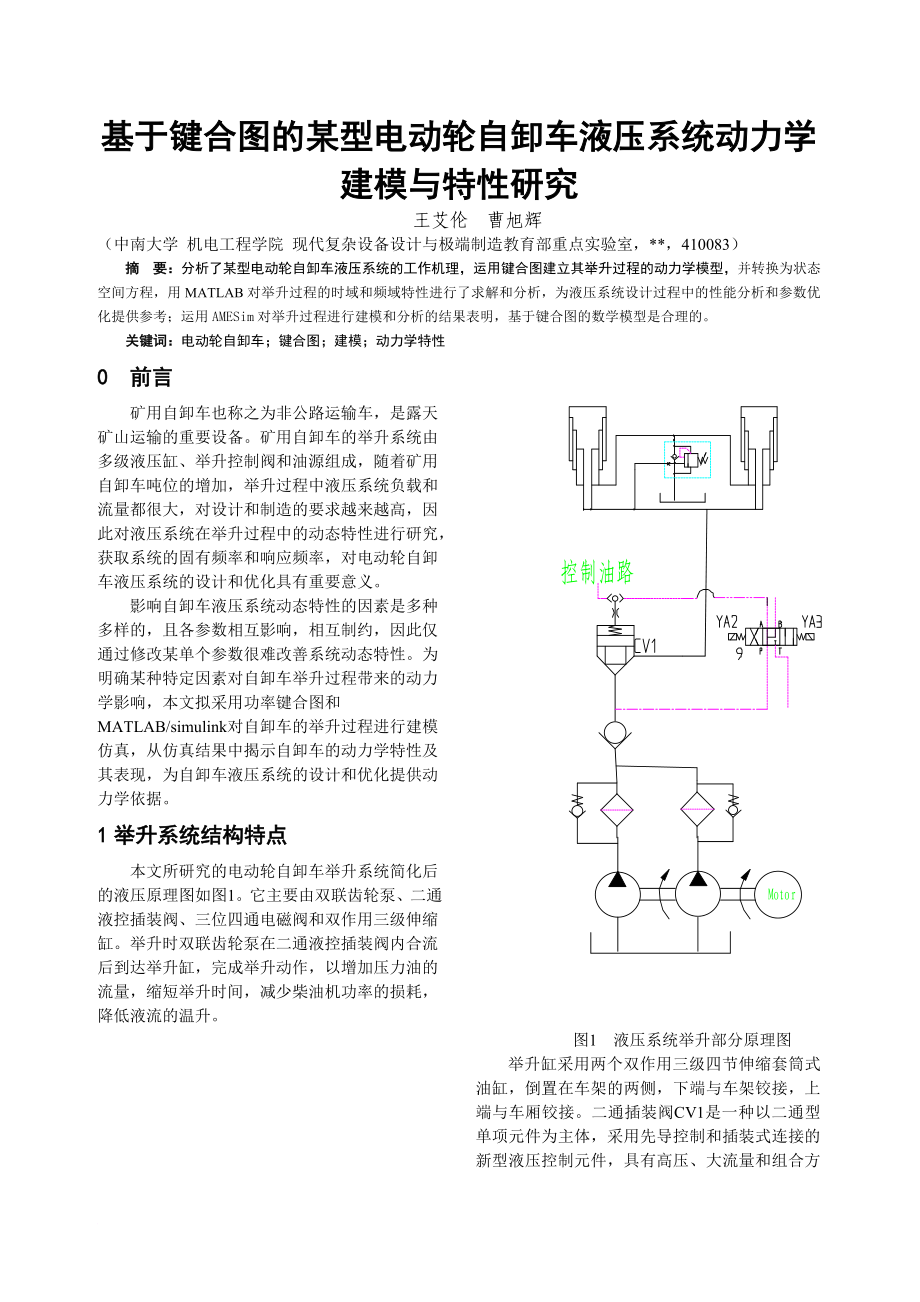
4、过程中的动态特性进行研究,获取系统的固有频率和响应频率,对电动轮自卸车液压系统的设计和优化具有重要意义。影响自卸车液压系统动态特性的因素是多种多样的,且各参数相互影响,相互制约,因此仅通过修改某单个参数很难改善系统动态特性。为明确某种特定因素对自卸车举升过程带来的动力学影响,本文拟采用功率键合图和MATLAB/simulink对自卸车的举升过程进行建模仿真,从仿真结果中揭示自卸车的动力学特性及其表现,为自卸车液压系统的设计和优化提供动力学依据。1举升系统结构特点本文所研究的电动轮自卸车举升系统简化后的液压原理图如图1。它主要由双联齿轮泵、二通液控插装阀、三位四通电磁阀和双作用三级伸缩缸。举升时
5、双联齿轮泵在二通液控插装阀内合流后到达举升缸,完成举升动作,以增加压力油的流量,缩短举升时间,减少柴油机功率的损耗,降低液流的温升。图1 液压系统举升部分原理图举升缸采用两个双作用三级四节伸缩套筒式油缸,倒置在车架的两侧,下端与车架铰接,上端与车厢铰接。二通插装阀CV1是一种以二通型单项元件为主体,采用先导控制和插装式连接的新型液压控制元件,具有高压、大流量和组合方式灵活的特点。电磁阀9主要控制自卸车的举升过程。自卸车在运行过程中电磁阀通过油路先导控制插装阀的开启和闭合,对主油路的动力学特性影响不大,故不予考虑。自卸车的主要性能参数描述如下:额定载重为300t;车厢自重为30t;举升角为55
6、;举升时间为24s;一级缸:最短:L1=1836mm,最长:L2=4461mm,总行程:L2-L1=2625mm,平均每级行程:l=875mm。一级缸壁厚为30mm,直径为360mm;二级缸壁厚为25mm,直径为280mm;三级缸壁厚为25mm,直径为210mm。2举升系统动力学建模功率键合图是一种先进的基于功率流的图形化建模方法,它能以统一的方式处理多种能量形式并存的工程系统,图形描述与数学描述的统一性及系统状态方程建立的格式化方式,使其在液压系统动态建模中得到广泛应用。本文采用功率键合图作为建模工具,对自卸车的举升过程进行建模仿真。为简化模型,假设举升过程矿物迅速下滑,不考虑举升缸的转动,
7、仅考虑其直线伸缩运动,忽略控制油路和主油道的分布效应对主油路动态特性的影响,不考虑各液压元件的外泄漏及各液压阀元件的内泄漏,假设油泵的供油流量恒定。根据液压系统举升部分的液压原理图(图1),可以绘制其键合图模型,如图2。图2 液压系统举升部分键合图模型模型中各符号的意义说明如下。(1)容性元件:C2、C9为齿轮泵及齿轮泵至插装阀油路的液容,由举升缸的位移x决定;C13为插装阀进油腔的液容;C19为插装阀弹簧柔度;C24为插装阀出口及插装阀至举升缸大腔油路的液容;C29、C37分别为举升缸大小腔的液容;C44为单向平衡阀及举升缸小腔至平衡阀油路的液容;C48为平衡阀出口及回油管路的液容。(2)感
8、性元件:I18为插装阀阀芯的液感;I27为插装阀至举升缸大腔油路中油液的液感;I52为举升缸及车厢、矿物的等效质量;I43为举升缸小腔至单向平衡阀油路中油液的液感。(3)源元件:Sf1和Sf10为两个齿轮泵流量输入;Se20为插装阀弹簧的预紧力;Se33为车厢及矿物对举升缸的作用力;Sf55为插装阀弹簧预紧力。(4)阻性元件:R4、R7为齿轮泵至插装阀油路的液阻;R53为插装阀进油口至大腔的液阻;R26为插装阀出口及举升缸大腔油路的液阻;R35为举升缸的内摩擦阻力,设摩擦系数为k;R40为举升缸的内泄漏;R41为举升缸小腔回油口至单向平衡阀油管的液阻;R46为单向平衡阀进油口的液阻;R54为溢
9、流阀出油口的液阻;R51为插装阀回油口至油箱油路的液阻。(5)转换系数:A4为插装阀下腔的面积;A5为插装阀上腔的面积;m1为各级举升缸的有效面积,由举升缸的伸缩位移x决定,当0x875mm,m=37994;当875x1750,m=61544,当1750x2625,m=101736。由图2的键合图模型,根据键合图的有关规则及其变量间的逻辑关系,推导其状态方程如下:取系统状态变量X=p27,p52,p43,q2,q9,q13,q20,q24,q29,q37,q44,q48T,输入变量U=Sf1,Sf10,Sf33,Sf55T,Sf1,Sf2为阶跃流量输入,Se55为插装阀弹簧的预紧力,Se33为
10、举升力,是举升缸伸缩位移的函数。e=q29/C29为举升缸大腔的压力,f27=p27/I27为举升缸的伸缩速度。代入数值并整理成的形式为:其中,取Sf1=500,Se33=1.4*106,Sf1=500,Se55=10。3举升系统动态特性求解用MATLAB求解系统的固有频率和振型如下:固有频率: 振型 :-0.979 + 0.622i -0.979 + 0.622i 0.295 -0.644 - 0.938i 0.632 - 0.768i 0.280 - 0.704i -0.104 - 0.253i -0.911 + 0.386i -0.897 + 0.409i 0.407 - 0.582i
11、-0.319 + 0.509i 0.535 + 0.837i -0.979 - 0.622i-0.979 - 0.622i0.295-0.644 + 0.938i0.632 + 0.768i0.280 + 0.704i-0.104 + 0.253i-0.911 - 0.386i-0.897 - 0.409i0.407 + 0.582i-0.319 - 0.509i0.535 - 0.837i固有频率:振型 :0.376 - 0.508i 0.376 - 0.508i -0.193 - 0.377i 0.848 + 0.901i 0.545 - 0.283i -0.691 - 0.902i -0
12、.173 + 0.729i 0.612 + 0.764i -0.507 + 0.892i 0.028 + 0.907i 0.461 0.409 - 0.418i0.376 + 0.508i0.376 + 0.508i-0.193 + 0.377i0.848 - 0.901i0.545 + 0.283i-0.691 + 0.902i-0.173 - 0.729i0.612 - 0.764i-0.507 - 0.892i0.028 - 0.907i0.4610.409 + 0.418i固有频率:振型 :-0.447 -0.447 -0.839 -0.724 -0.926 -0.866 -0.767
13、 0.451 0.292 0.473 0.304固有频率:振型 :-0.837 - 0.857i-0.837 - 0.857i-0.586 - 0.506i-0.971 + 0.290i-0.587 + 0.624i 0.545 + 0.221i0.383 + 0.398i-0.019 - 0.826i-0.918 - 0.768i-0.096 + 0.661i 0.794 0.761 - 0.141i-0.837 + 0.857i -0.837 + 0.857i -0.586 + 0.506i -0.971 - 0.290i -0.587 - 0.624i 0.545 - 0.221i 0.
14、383 - 0.398i -0.019 + 0.826i -0.918 + 0.768i -0.096 - 0.661i 0.794 0.761 + 0.141i由于阻尼的存在,系统存在复模态,表现在特征向量当中存在复数。系统传递函数的零点为: 1.0e+007 *-8.338 8.338 -0.622 -0.091 + 0.648i -0.091 - 0.648i -0.029 + 0.903i -0.029 - 0.903i 0.932 + 0.414i 0.932 - 0.414i系统的极点为:-76.477 -33.488 +41.924i-33.488 -41.924i-23.779
15、 +37.077i-23.779 -37.077i-39.449 -12.283 +19.792i-12.283 -19.792i-12.980 -4.728 -0.235 系统的单位阶跃响应如下:系统的Bode图如下:4讨论与分析为了验证举升系统键合图模型的科学性和合理性,进一步揭示自卸车液压系统在举升过程中的动态特性,本文拟运用AMESim仿真软件对举升系统进行建模。运用AMEsim软件建立举升系统的模型如图4。图4 液压系统举升过程AMEsim仿真模型对液压系统的AMEsim模型进行动力学仿真,可以获得自卸车在举升过程举升缸大腔内的压力变化情况与进口处流量变化情况。图5所示是仿真时间内三
16、级举升缸主要参数的时域分析,包括三级举升液压缸大腔压力变化、三级举升液压缸进油口流量变化情况三部分,所对应的频域特性如图6所示。图5 图 6对比发现,运用AMEsim软件的仿真结果与基于键合图模型的仿真一致,不难得出如下结论,基于键合图的举升系统模型是科学、合理的,基本符合工程实际。5结论本文基于键合图理论建立某型电动轮自卸车液压系统举升过程中的键合图模型,求得液压系统状态方程的时域解和频域解,揭示了液压系统各部分在举升过程中的瞬态特性和稳态特性,主要结论如下:(1)举升液压系统在举升阶段,三级举升液压缸伸出时有明显的压力冲击,第一级缸伸出时的冲击峰值较大,前两级缸的压力波动时间较短,第三级缸
17、伸出时压力波动相对明显,但第二、第三级缸伸出时的压力峰值都不大,不会对系统造成不良影响。(2)三级举升液压缸伸出速度递增,速度转换平稳,波动时间很短。(3)建模时假设负载是线性变化的,与实际情况有一定的偏差,如何建立考虑有车斗重心变化更详细的键合图模型,还有待进一步完善。参考文献1 王艾伦,仇勇,X吉平. 基于键图的复杂机电系统模块化自动建模及仿. 株洲工学院学报,2002,16(6)2毕红霞,王艾伦.基于AMESIM的220t矿山自卸车举升系统多级液压缸的建模与仿真.现代机械,2008(4)3 王欣,苗全才. 二通插装阀动态特性优化设计. 机床与液压,2006(3)4 赵遵平等. SF339
18、00型电传动矿用自卸车液压系统设计与动态分析.中南大学硕士学位论文,20085王艾伦,X琳琳等. 基于键合图模型的某专用卸荷溢流阀故障诊断分析. 机械科学与技术,2006(9)6王艾伦,X琳琳等.基于数学模型的108t电动轮自卸车举升系统故障分析. 机床与液压,2006(10)7杨务滋,季伟.矿用自卸车举升液压系统的动力学建模与仿真. 现代制造工程,2009(3)8王运赣,王紫薇.系统动力学.华中科技大学,1991附部分程序:%求系统的传递函数与时域解(零点和极点)A=1e1*-1.3,0,-1.5,0,0,0,0,0,0,0,0,0; 0,-1.3,-1.5,0,0,0,0,0,0,0,0,
19、0; 1.3,1.4,-1.8,0,1.4,0,0,0,0,0,0,1.2; 0,0,0.013,0,-0.015,0,0,0,0,0,0,0; 0,0,1.5,0,-1.7,-4.6,0,0,0,0,0,0; 0,0,0,0,2.4,-3.19,-1.8,0,0,0,0,0; 0,0,0,0,0,3.6,-1.3,-2.7,1.19,0,0,0; 0,0,0,0,0,0,0.035,0.015,-0.024,0,0,0; 0,0,0,0,0,0,3.7,4.2,-2.9,-3.7,0,0; 0,0,0,0,0,0,0,0,2,-3.4,-1.9,0; 0,0,0,0,0,0,0,0,0,4.
20、5,-2.1,-3.8; 0,0,3.2,0,0,0,0,0,0,0,2.7,-8.5B=1,1,0,1,0,0,0,-1.8,0,0,0,0C=0 0 0 0 0 0 0 0 0 0 0 1;D=0;num,den=ss2tf(A,B,C,D)roots(num);roots(den)%求系统的阶跃响应A=1e1*-1.3,0,-1.5,0,0,0,0,0,0,0,0,0; 0,-1.3,-1.5,0,0,0,0,0,0,0,0,0; 1.3,1.4,-1.8,0,1.4,0,0,0,0,0,0,1.2; 0,0,0.013,0,-0.015,0,0,0,0,0,0,0; 0,0,1.5,0
21、,-1.7,-4.6,0,0,0,0,0,0; 0,0,0,0,2.4,-3.19,-1.8,0,0,0,0,0; 0,0,0,0,0,3.6,-1.3,-2.7,1.19,0,0,0; 0,0,0,0,0,0,0.035,0.015,-0.024,0,0,0; 0,0,0,0,0,0,3.7,4.2,-2.9,-3.7,0,0; 0,0,0,0,0,0,0,0,2,-3.4,-1.9,0; 0,0,0,0,0,0,0,0,0,4.5,-2.1,-3.8; 0,0,3.2,0,0,0,0,0,0,0,2.7,-8.5B=1,1,0,1,0,0,0,-1.8,0,0,0,0%B=1,1,0,1,
22、0,0,0,1,0,0,0,0%B=500,500,0,-10,0,0,0,1.4e6,0,0,0,0C=0 0 0 0 0 0 0 0 0 0 0 1;D=0;t=(0.001:0.1:100);figurehold onu=1*heaviside(t)y,x=lsim(A,B,C,D,u,t);plot(t,y)gridtitle(Step Response(1)%求系统的频域解(特征值和特征向量)A=1e1*-1.3,0,-1.5,0,0,0,0,0,0,0,0,0; 0,-1.3,-1.5,0,0,0,0,0,0,0,0,0; 1.3,1.4,-1.8,0,1.4,0,0,0,0,0,
23、0,1.2; 0,0,0.013,0,-0.015,0,0,0,0,0,0,0; 0,0,1.5,0,-1.7,-4.6,0,0,0,0,0,0; 0,0,0,0,2.4,-3.19,-1.8,0,0,0,0,0; 0,0,0,0,0,3.6,-1.3,-2.7,1.19,0,0,0; 0,0,0,0,0,0,0.035,0.015,-0.024,0,0,0; 0,0,0,0,0,0,3.7,4.2,-2.9,-3.7,0,0; 0,0,0,0,0,0,0,0,2,-3.4,-1.9,0; 0,0,0,0,0,0,0,0,0,4.5,-2.1,-3.8; 0,0,3.2,0,0,0,0,0,0
24、,0,2.7,-8.5B=1,1,0,1,0,0,0,-1.8,0,0,0,0C=0 0 0 0 0 0 0 0 0 0 0 1;D=0;%求系统的频域特性 (波德图)clfclgclearsys=tf(0 0 0 0.864 0.160 0.560 0.056 0.632 0.081 0.640 0.791 2.291,0.001 0.275 0.607 0.693 0.239 0.244 0.173 0.274 0.710 2.620 6.461 2.606,0.1)w=logspace(-1,2.3);mag,phase,w=bode(sys,w);c=size(mag);c=c(1,3
25、);mag1=zeros(c,1);mag0=mag1;for i=1:c mag1(i)=20*log10(mag(1,1,i); phase1(i)=phase(1,1,i); mag0(i)=abs(mag1(i)+3);endGm,Pm,Wpc,Wgc=margin(mag,phase,w)mag2,i=max(mag1);Wr=w(i);Mr=mag2;mag3,i=min(mag0);W_3db=w(i);figure(1)subplot(211),semilogx(w,mag1,b,w,w*0-3,:r),gridsubplot(212),semilogx(w,phase1,b,w,w*0-180,:r),grid
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
