《《自动控制原理》MATLAB分析与设计》由会员分享,可在线阅读,更多相关《《自动控制原理》MATLAB分析与设计(20页珍藏版)》请在装配图网上搜索。
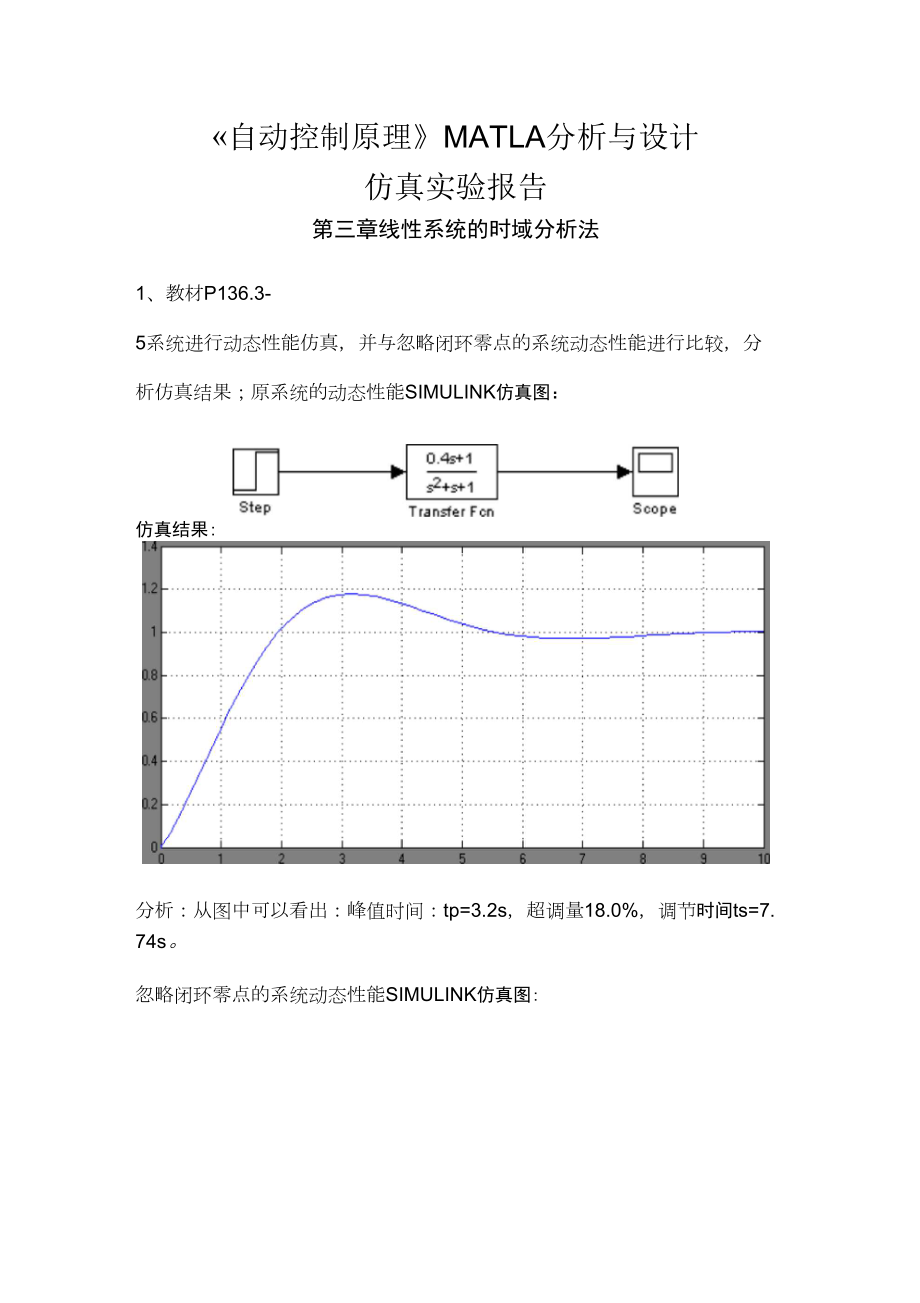
1、自动控制原理MATLA分析与设计仿真实验报告第三章线性系统的时域分析法1、教材P136.3-5系统进行动态性能仿真,并与忽略闭环零点的系统动态性能进行比较,分析仿真结果;原系统的动态性能SIMULINK仿真图:仿真结果:分析:从图中可以看出:峰值时间:tp=3.2s,超调量18.0%,调节时间ts=7.74s。忽略闭环零点的系统动态性能SIMULINK仿真图:1TransferFenScope仿真结果:分析:从图中可以看出:峰值时间:tp=3.6s,超调量16.7%,调节时间ts=7.86s。两种情况动态性能比较SIMULINK仿真图:仿真结果:分析:通过比较可以看出闭环零点对系统动态性能的影
2、响为:减小峰值时间,使系统响应速度加快,超调量增大。这表明闭环零点会减小系统阻尼。3-9系统SIMULINK仿真图:仿真结果:ScopeO分析:从图中可以看出:峰值时间:tp=1.05s,超调量35.1%,调节时间ts=3.54s(=2%)。Scopel分析:从图中可以看出:峰值时间:tp=0.94s,超调量37.1%,调节时间ts=3.44s(=2%)。Scope2分析:由于计算机在计算的过程也存在误差,因此,不同的参数时,两条线重合,需将闭环传递函数计算出来再作比较。计算出闭环传递函数SIMULINK仿真图:10ScopeSScope4TransferFcn3Scope3分析:从图中可以看
3、出:峰值时间:tp=1.05s,超调量35.1%,调节时间ts=3.54s(=2%)。分析:从图中可以看出:峰值时间:tp=0.94s,超调量37.1%,调节时间ts=3.44s(=2%)。前馈控制结果:比较表明系统的稳定性与前馈控制无关;微分反馈使系统的性能得到了改善。3、英文讲义P153.E3.3SIMULINK仿真图:6250+131281!ScopeGTransteiFcn4仿真结果:4、实例“DiskDriveReadSystem”,在Ka=100时,试采用微分反馈使系统的性能满足给定的设计指标。SIMULINK仿真图:仿真结果:第四章线性系统的根轨迹法1、英文讲义P157.E4.5
4、MATLABS序:num二1;den=1-10;rlocus(num,den)仿真结果:.6XAvanLyam28-0.111-1iiiRootLocus00.20.40.6RealAxis0.811.2864202oo-46oo-2、P181.4-5-(3)的根轨迹MATLABS序:G二zpk(,0-1-3.5-3-2i-3+2i,1);rlocus(G);根轨迹图:-11-11-10-10-50RealAxisRootLocus1055o1510CPXAvyanman习题4-10MATLABS序:G1=zpk(,O0-2-5,1);G2二zpk(-0.5,00-2-5,1);figure(
5、1)rlocus(G1);figure(2)rlocus(G2);根轨迹图:章五10第5-RootLocus1510-51015201510-5-10-15-20-15-10-510RealAxis-20-25VRanpsa卩.6XAvanLyap-10-20-15-10RealAxisRootLocus线性系统的频域分析法MATLABS序:G=tf(1,1,conv(0.5,1,0,1/9,1/3,1);bode(G);grid响应曲线:50l9eares9h-50-100-45-90-135-180-225-270-L,0BodeDiagram-1010110Frequency(rad/s
6、ec)105-16MATLABS序:210K1=1;T仁2;G1=tf(K1,conv(conv(1,0,T1,1),1,1);G11=feedback(G1,1);K2=2;T2=0.5;G2=tf(K2,conv(conv(1,0,T2,1),1,1);G21=feedback(G2,1);K3=2;T3=0.5;G3二tf(K2,conv(conv(1,0,T3,1),1,1);G31二feedback(G3,1);figure(1);step(G11);grid;figure(2);step(G21);grid;figure(3);step(G31);grid;响应曲线:1.8Step
7、Response1.61.41.20.80.60.40.21020253035404550Time(sec)eupmAh11111J1/Vj1A11111V丄J1111111r15lmA1.81.61.41.210.80.60.40.2A!11/X1111厂、11111fJ11/111111VrStepResponse1535404500510202530Time(sec)50eg-lmAStepResponse1.81.61.41.210.80.60.40.2005101520253035404550Time(sec)第六章线性系统的校正1、习题6-20,根据计算所得K仁5;K2=2.5;M
8、ATLABS序:K1=5;K2=2.5;GO二tf(10,1,10,0);Gc二tf(K1,K2,1,0);G=series(GO,Gc);G1=feedback(G,1);step(G1);grid响应曲线StepResponse2、习题6-18,MATLABS序:t=0:0.01:1;Ka=10;Kb=0;k1=4.16;K2=52.75;K3=1.24;G仁tf(20*K2,1,3+Kb+20*K3,2+20*Ka+Kb+20*K1,20*K2);step(G1,t);grid;响应曲线10.90.8StepResponse70620.154lm分析:本设计联合采用PID控制器与前置滤波
9、器,使系统具有最小节拍响应,保证系统有良好的稳态性能和动态性能,采用内回路反馈包围被控对象,以减小被控对象参数摄动的影响,使系统具有鲁棒性。第七章线性离散系统的分析与校正1、教材P383.7-20的最小拍系统设计及验证MATLABS序:T=1;t=0:1:10;sys二tf(O,1,1,O,T);step(sys,t);axis(1,10,0,1.2);grid;xlabel(t);ylabel(c(t);StepResponse2、教材7-25的控制器的设计及验证MATLABS序:T=0.1;sys仁tf(150,105,1,10.1,151,105);sys2二tf(0.568,-0.12
10、21,-0.3795,1,-1.79,1.6,-0.743,T);step(sys1,sys2,4);grid;0.60.40.200.512.533.541.81.61.41.2StepResponse8o01.52Time(sec)当T=0.01时的单位响应曲线StepResponse6428o6o1.52Time(sec)2.53.54MATLABS序:T=0.1;t=0:0.1:2;u=t;sys二tf(0.568,-0.1221,-0.3795,1,-1.79,1.6,-0.743,T)lsim(sys,u,t,O);grid;单位斜坡响应曲线:LinearSimulationResultso
 《自动控制原理》MATLAB分析与设计
《自动控制原理》MATLAB分析与设计