《PLC编程与伺服控制系统》由会员分享,可在线阅读,更多相关《PLC编程与伺服控制系统(4页珍藏版)》请在装配图网上搜索。
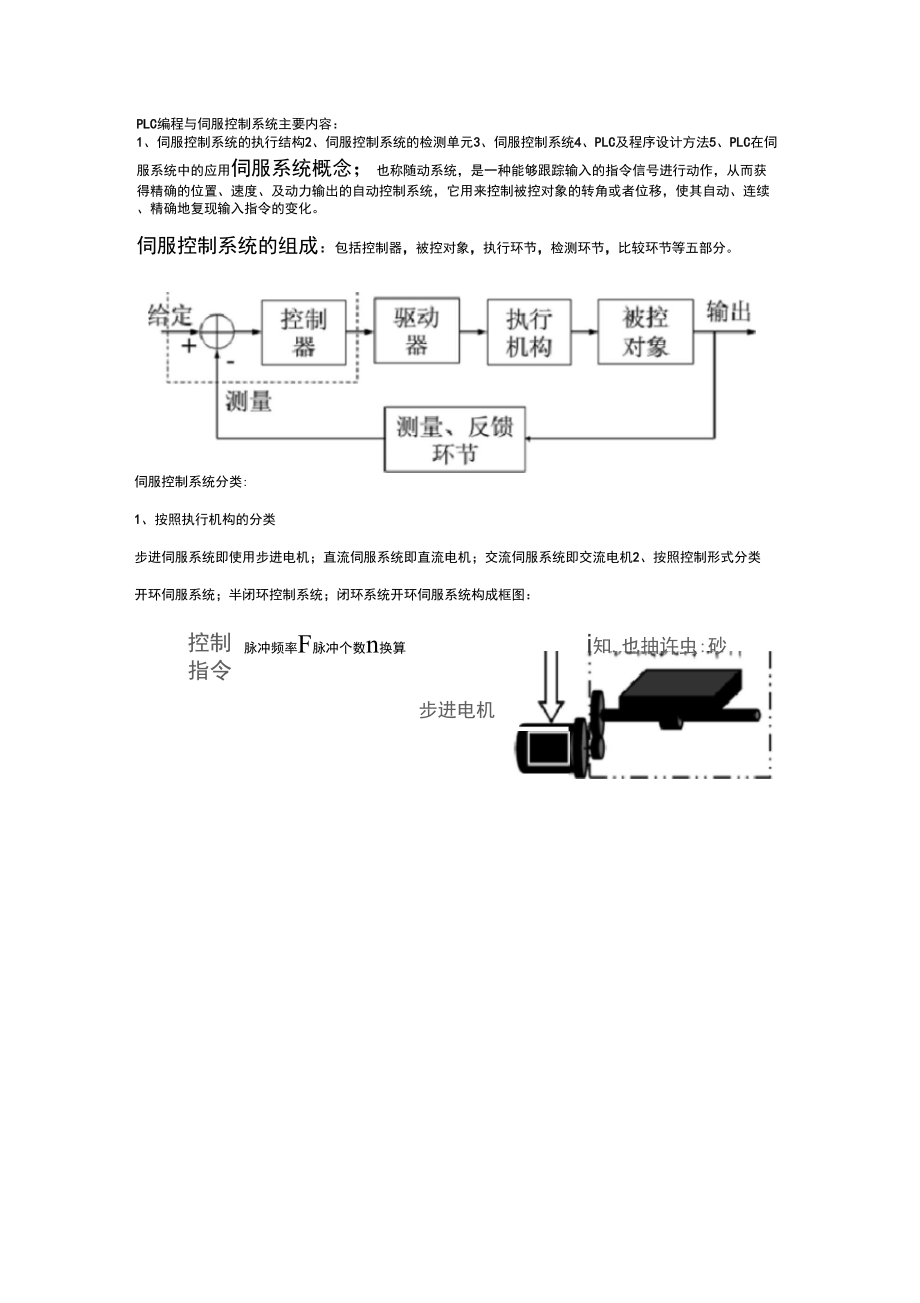
1、PLC编程与伺服控制系统主要内容:1、伺服控制系统的执行结构2、伺服控制系统的检测单元3、伺服控制系统4、PLC及程序设计方法5、PLC在伺服系统中的应用伺服系统概念;也称随动系统,是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度、及动力输出的自动控制系统,它用来控制被控对象的转角或者位移,使其自动、连续、精确地复现输入指令的变化。伺服控制系统的组成:包括控制器,被控对象,执行环节,检测环节,比较环节等五部分。伺服控制系统分类:1、按照执行机构的分类步进伺服系统即使用步进电机;直流伺服系统即直流电机;交流伺服系统即交流电机2、按照控制形式分类开环伺服系统;半闭环控制系统;闭环系统
2、开环伺服系统构成框图:控制指令脉冲频率F脉冲个数n换算步进电机i知.也抽许虫:砂半闭环控制系统构成图位暨反馈Ij速度控制单元位置控制器速度控制与驱动器i机械执行部件j闭环控制系统构成框图实际速度反悄;电机T检测与反jL?进上厂在豆冠环1还可接方法i位置控制单元;:!1位置位置挫制器-V:速度揑制单元:M1I14蚣_速度控制彳1!与驱动器i机械执行部件j际置馈实位民-际度馈-实速屁直集位置检测i检测与反j幘单元i3、按反馈比较方式分类脉冲、数字比较伺服系统;相位比较伺服系统;幅值比较伺服系统;全数字伺服系统4、按控制参数分类位置伺服系统;速度伺服系统;力矩伺服系统伺服系统的技术要求系统精度:伺服
3、系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,可概括为动态误差,稳态误差和静态误差三个方面组成。稳定性:伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够恢复到原来稳定状态的能力;或者当给系统一个新的输入指令后,系统达到新的稳定运行状态的能力响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率响应速度与许多因素有关,如计算机的运行速度,运动系统的阻尼和质量等。工作频率通常是指系统允许输入信号的频率范围当工作频率信号输入时,系统能够按技术要求正常工作;而其它频率信号输入时,系统不能正常工作。伺服电机驱动器确定根据伺服系统的总体控制方案及执行机构的选择来
4、确定伺服驱动环节。控制规律的确定依据系统结构、控制精度、动态响应速度、超调限制等确定控制规律其他系统辅助元件的选取四、PLC与伺服控制1、PLC在伺服控制系统中的作用1)作为主控单元与伺服单元(模块)一起完成较高精度的伺服控制。2)完成一些低精度的直接控制2、PLC的伺服控制功能1)软件模块为伺服控制应用专门设计的一些指令模块。2)硬件模块为伺服控制设计的一些硬件单元3、PLC运动控制器(卡)和数控系统PLC以逻辑判断,动作控制为主,对于复杂运算,尤其是曲线浮点运算能力较差。PLC般需要配置相应的伺服单元才可进行精确的运动伺服控制。单独使用无伺服单元的PLC般无法满足精度、速度等要求,一般用于
5、精度要求不高的伺服系统专用运动控制器(卡):专用针对运动控制的运算,更多的是在电机、转轴的运动控制上。控制器通过通信接口与计算机一起完成伺服控制,控制卡为基于pc的运动控制器,两者本质上没有太大的差别。伺服控制器(卡)一般配有专门的软件用于系统配置监控。基于pc的数控系统:结合运动控制及动作的逻辑控制,多参数的运算功能,结合了运动控制器(卡)及PLC的一些功能,成本较高。主要参考书: 1钱平伺服系统北京:机械工业出版社,2011.2邹逢兴主编控制器件(第二版)北京:中国水利出版社.2011.3寇宝泉,程树康.交流伺服电机控制技术.北京:机械工业出版社2003.4贺昱曜运动控制系统西安:西安电子科技大学出版社.2009.5陈隆昌控制电机(第三版),西安西安电子科技大学山版社2003.6张莉松伺服系统的原理与设计北京:北京理工大学出版社,2006.
 PLC编程与伺服控制系统
PLC编程与伺服控制系统