 模糊控制理论文献综述
模糊控制理论文献综述

《模糊控制理论文献综述》由会员分享,可在线阅读,更多相关《模糊控制理论文献综述(14页珍藏版)》请在装配图网上搜索。
1、如果您需要使用本文档,请点击下载按钮下载!模糊控制理论文献综述摘要模糊控制理论是以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。实质上模糊控制是一种非线性控制,从属于智能控制的范畴。模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。本文简单介绍了模糊控制的概念,模糊控制系统的组成,模糊控制的算法,其中包含模糊控制系统的原理、
2、模糊控制器的分类及其设计元素。最后以模糊PID复合控制在锅炉汽包水位控制中的应用说明模糊控制系统的整体设计过程,通过仿真证明了模糊控制显示出的优势。1. 模糊控制的基本思想模糊控制是模糊集合理论中的一个重要方面,是以模糊集合化、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制,从线性控制到非线性控制的角度分类,模糊控制是一种非线性控制;从控制器的智能性看,模糊控制属于智能控制的范畴12。模糊控制是建立在人类思维模糊性基础上的一种控制方式,模糊逻辑控制技术模仿人的思考方式接受不精确不完全信息来进行逻辑推理,用直觉经验和启发式思维进行工作,是能涵盖基于模型系统的技术。它不需用精确的公式来表示传
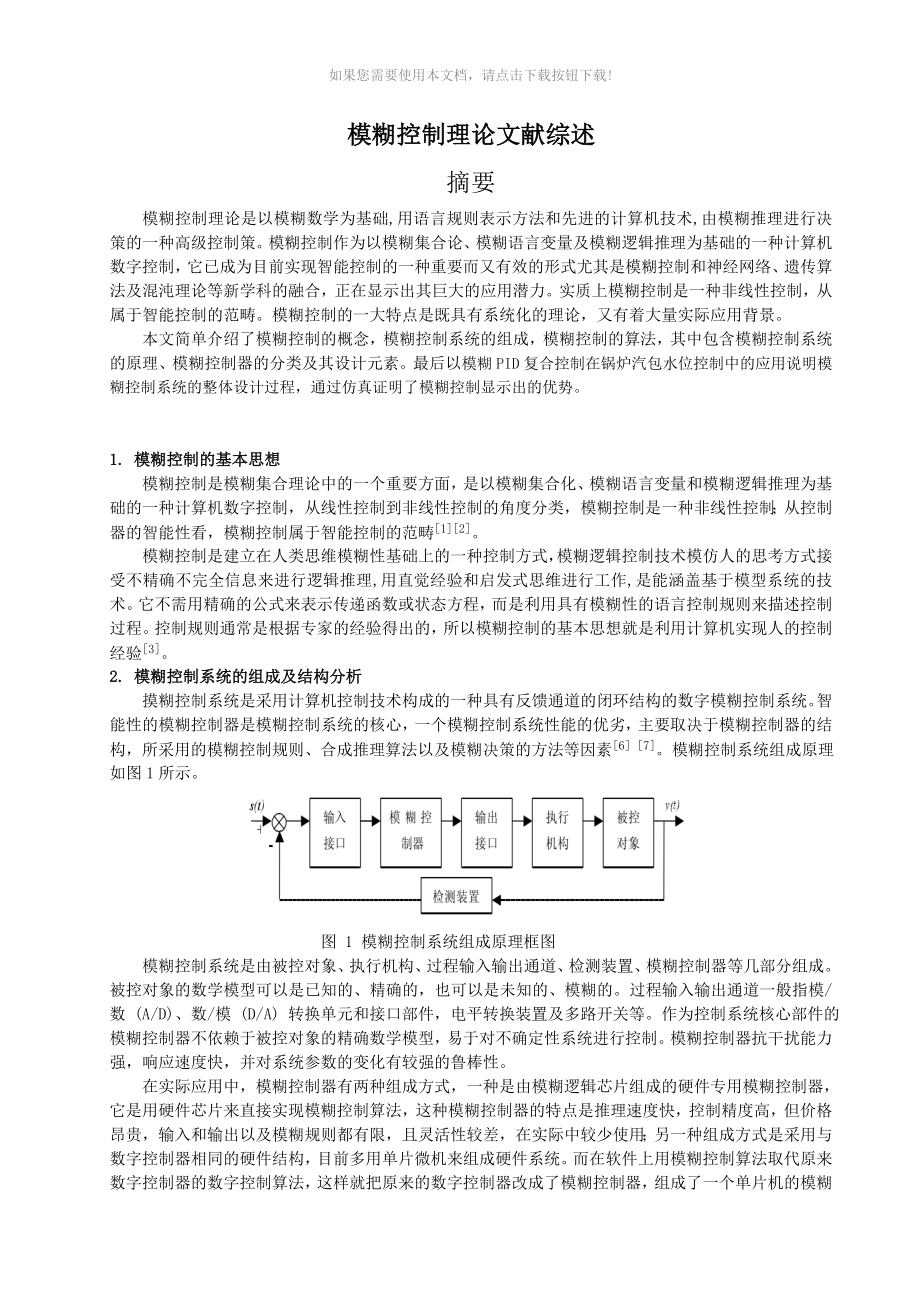
3、递函数或状态方程,而是利用具有模糊性的语言控制规则来描述控制过程。控制规则通常是根据专家的经验得出的,所以模糊控制的基本思想就是利用计算机实现人的控制经验3。2. 模糊控制系统的组成及结构分析摸糊控制系统是采用计算机控制技术构成的一种具有反馈通道的闭环结构的数字模糊控制系统。智能性的模糊控制器是模糊控制系统的核心,一个模糊控制系统性能的优劣,主要取决于模糊控制器的结构,所采用的模糊控制规则、合成推理算法以及模糊决策的方法等因素6 7。模糊控制系统组成原理如图1所示。图 1 模糊控制系统组成原理框图模糊控制系统是由被控对象、执行机构、过程输入输出通道、检测装置、模糊控制器等几部分组成。被控对象的
4、数学模型可以是已知的、精确的,也可以是未知的、模糊的。过程输入输出通道一般指模/数 (A/D)、数/模 (D/A) 转换单元和接口部件,电平转换装置及多路开关等。作为控制系统核心部件的模糊控制器不依赖于被控对象的精确数学模型,易于对不确定性系统进行控制。模糊控制器抗干扰能力强,响应速度快,并对系统参数的变化有较强的鲁棒性。在实际应用中,模糊控制器有两种组成方式,一种是由模糊逻辑芯片组成的硬件专用模糊控制器,它是用硬件芯片来直接实现模糊控制算法,这种模糊控制器的特点是推理速度快,控制精度高,但价格昂贵,输入和输出以及模糊规则都有限,且灵活性较差,在实际中较少使用;另一种组成方式是采用与数字控制器
5、相同的硬件结构,目前多用单片微机来组成硬件系统。而在软件上用模糊控制算法取代原来数字控制器的数字控制算法,这样就把原来的数字控制器改成了模糊控制器,组成了一个单片机的模糊控制系统。如果您需要使用本文档,请点击下载按钮下载!模糊控制器 (FCFuzzy Controller) 又称为模糊逻辑控制器 (FLCFuzzy Logic Controller),它的模糊控制规则用模糊条件语句来描述,是一种语言型控制器,因此有时又被称为模糊语言控制器。模糊控制器的机构框图如图2所示。图 2 模糊控制器结构框图图2中,u(t)是被控对象的输入,y(t)是被控对象的输出,s(t)是参考输入,e为误差。图中虚线
6、框内就是模糊控制器,它根据误差信号产生合适的控制作用,输出给被控对象。模糊控制器主要由模糊化接口、知识库、模糊推理机、解模糊解口四部分组成,各部分作用如下:1.模糊化 模糊化接口接受的输入只有误差信号e,由e再生成误差变化率e或误差的积分,模糊化接口完成两项功能:论域变换:e和e都是非模糊的普通变量,它们的论域 (即变化范围) 是实际域上的一个真实论域,分别用X和Y来代表。在模糊控制器中,真实论域要变换到内部论域X和Y,无论是对于D-FC (离散论域的模糊控制器),还是C-FC(连续论域的模糊控制器) ,论域变换后e和e变成E和EC,相当于乘了一个比例因子(还可能有偏移)。模糊化:论域变换后E
7、和EC仍是非模糊的普通变量,这里把它们分成若干个模糊集合,如:“负大”(NL)、“负中”(NM)、“负小”(NS)、“零”(Z)、“正小”(PS)、“正中” (PM)、“正大” (PL),并在其内部论域上规定各个模糊集合的隶属度函数。在 t 时刻输入信号的值e和e经论域变换后得到E和EC,再根据隶属函数的定义可以分别求出 E 和 EC 对各模糊集合的隶属度,如nl(E)、nm (EC)、,这样就把普通变量的值变成了模糊变量 (即语言变量)的值,完成了模糊化的工作。这里 E,EC 既代表普通变量又代表了模糊变量,作为普通变量时其值在论域 X和Y中,是普通数值;作为模糊变量是其值在论域0,1中,是
8、隶属度。2.知识库 知识库中存储着有关模糊控制器的一切知识,它们决定着模糊控制器的性能。是模糊控制器的核心。知识库又分为两部分,分别介绍如下: 数据库:它与计算机软件中的数据库不同,它存储着有关模糊化、模糊推理、解模糊的一切知识,如模糊化中的论域变换方法、输入变量各模糊集合的隶属函数定义、模糊推理算法、解模糊算法、输出变量各模糊集合的隶属函数定义等。当论域离散且元素个数有限时,模糊集合的隶属函数可以用向量或者表格的形式来表示。当论域连续时,隶属度常常用三角形、梯形、高斯型函数等。 规则库:其中包含一组模糊控制规则,即以“if ,then ”形式表示的模糊条件语句如 R1:if E is A1
9、and EC is B1, then U is C1;R2:if E is A2 and EC is B2, then U is C2;Rn:if E is An and EC is Bn, then U is Cn。其中,E和EC就是前面的语言变量,A1,A2,,An是E的模糊集合,B1,B2,Bn是 EC的模糊集合,C1,C2,Cn是U的模糊集合。每条规则是在一个积分空间XY Z中的模糊关系,EX,ECY,UZ。如果 X、Y 、Z 皆为离散论域,还可以写成模糊关系矩阵Ri,i=1,2,n。规则库中的 n条规则是并列的,它们之间是“或”的逻辑关系,因此整个规则集的模糊关系为如果您需要使用本文
10、档,请点击下载按钮下载!3.模糊推理机 推理机有每个采样时刻的输入,依据模糊控制规则推导出控制作用,而模糊控制规则这一组模糊条件语句可以导出一个输入输出空间上的模糊关系,推理机按着模糊推理的合成规则进行运算从,而求得控制作用,推理机制为在 t 时刻若输入量为E和 EC,EX,EC Y,若论域 X、Y、Z皆为离散的,E 在 X上对应矢量 A,EC 在对应矢量B,则推理结果是Z上的矢量C。常见的模糊推理系统有三类:纯模糊推理系统、高木-关野 (Takagi-Sugemo) 型和具有模糊产生器和模糊消除器的模糊逻辑系统(Mamdani) 型8 9 。(1)纯模糊推理系统 纯模糊推理系统的输入和输出均
11、为模糊集和,而现实世界中大多数工程系统的输入和输出都是精确值,因而纯模糊逻辑系统不能直接应用于实际工程中。(2)高木-关野 (Takagi-Sugemo) 型 它是一类较为特殊的模糊逻辑系统,采用如下模糊规则:If x是 A, x是 A,x是 A, then y=c+其中,A(i=1,2,n) 是模糊语言值,c(i=1,2,n) 是确定值参数。可以看出Sugeno型在没有模糊消除器下仍是精确值。但同时可以看到规则的输出部分不具有模糊语言值的形式,因此不能充分利用专家的控制知识。(3)Mamdani 型 Mamdani 型是在纯模糊逻辑系统的输入和输出部分添加了模糊产生器和模糊消除器,得到的模糊
12、逻辑系统的输入和输出均为精确量,因而可以直接在实际工程中加以应用,且应用广泛。4解模糊 解模糊可以看作模糊化的反过程,它要由模糊推理结果产生tu 的数值,作为模糊控制器的输出。解模糊接口主要完成以下两项工作:解模糊:对ut也要有真实论域Z变换到内部论域 Z,对 UZ定义若干个模糊集合,并规定各模糊集合的隶属度函数。模糊推理是在内部论域上进行的,因此得到的推理结果C是Z上的模糊矢量,其元素为对 U 的某个模糊集合的隶属度。对于某组输入 E 和 EC,一般会同时满足多条规则,因此会有多个推理结果Ci,i 为不同的模糊集合,用下面公式求 C。C=,并用解模糊算法 (如最大隶属度法、重心法、中位法等)
13、 ,即可求得此时的内部控制量u(t)。 论域反变换:得到的 U Z,进行论域反变换即可得到真正的输出 u Z,它仍是非模糊的普通变量。3.模糊控制算法的实现模糊控制算法的实现方法目前有三种,即查表法、硬件专用模糊控制器和软件模糊推理等。其最主要的区别在于模糊推理的实现方法不同10。1.查表法 适用于输入、输出论域为离散有限论域的情况。查表法是输入论域上的点到输出论域的对应关系,它已经是经过了模糊化、模糊推理和解模糊的过程,它可以离线计算得到,模糊控制器在线运行时,进行查表就可以了,因而可以大大加快在线运行的速度。这一过程可以用图3表示。本论文模糊控制器的设计采用的正是此法。如果您需要使用本文档
14、,请点击下载按钮下载!图 3 查表法2.硬件模糊控制器 采用具有模糊推理功能的模糊芯片,它推理速度快,控制精度高,处理速度至少比软件提高一个数量级。目前已经采用的硬件实现模糊控制器产品有日本立石公司的模糊控制器 FZ1000,2000,5000,6000 等,日本奥井点电机公司的 FOC2001A,日新电机的模糊控制器等等。限制硬件模糊控制器普及的主要因素是价格问题,目前模糊芯片的价格还是比较昂贵的14。3.软件模糊推理法 采用软件模糊推理法指用软件实现输入模糊化、模糊推理算法以及输出解模糊等模糊过程,尤其是模糊推理过程,它不同于查表法,可以把模糊推理过程离线完成,而是在线运行时每一个采样周期
15、都要进行模糊推理。因此这种方法灵活性强,应用范围广,比查表法有更高的精度,但由于其推理要花费一定的时间,因而要求计算机有较高的运行速度。目前有用软件实现的通用模糊控制器产品,也有在它们生产的产品中配置有模糊控制软件模块。4 模糊控制方法的进展191.Fuzzy-PID复合控制Fuzzy-PID复合控制指的是模糊控制技术与常规PID控制算法相结合的控制方法。常用的是模糊控制器与PI调节器相结合的Fuzzy-PI双模控制形式。这种控制形式的出发点主要是因为模糊控制器本身消除稳定误差的性能较差,加入 PI调解器可以消除稳定误差的作用。控制策略上为,在大偏差范围内,即偏差e在某个阀值之外采用模糊控制,
16、以获得良好效果的瞬态性能;在小偏差范围内,即e落在阀值之内时转换成PID(或PI)控制,以获得良好的稳态性能。二者之间的转换阀值由微机程序根据事先给定的偏差范围自动实现。参数自整定模糊控制关系式:u=kf(ke, kec)f为非线性函数,显然 FLC 的控制作用u 与比例因子k1、k2和量化因子k3有关系,它们的变化引起了控制系统的动态性能和稳态性能的变化。在线整定比例因子k1 、k2 和量化因子k3,使他们保持合适的数值,在随机的环境中能对控制器进行自动校正,使得在被动对象特性变化或扰动情况下,控制系统保持较好的性能。对于经典的单变量二维 FLC,由上式可以看出比例因子k1、k2分别相当于模
17、糊控制的比例作用和微分作用的系数,量化因子k3则相当于总的放大倍数。具体比例因子k1、k2和量化因子k3与系统性能的如下关系。一般k1越大,系统调节惰性越小,上升速率越快。但k1过大,将使体统产生较大的超调,使调节时间增长,严重时会产生振荡乃至系统不稳定。但k1 过小,系统上升速率变小,调节惰性变大,使稳态精度降低。K2越大,对系统状态变化的抑制能力增大,使超调量减小,增加系统稳定性。但k2过大,会使系统输出上升速率过小,使系统的过渡过程时间变长。K2过小,系统输出上升速率增大,导致系统产生过大的超调和振荡。K3增大,相当于系统总的放大倍数增大,系统相应速度加快。在上升阶段,k3 越大,上升越
18、快,但也容易产生超调。K3过小,则系统反应缓慢,使调节时间加长。如果您需要使用本文档,请点击下载按钮下载!2.自适应模糊控制20 自适应模糊控制又称为自组织模糊控制,它在控制过程中自动地对模糊控制规则进行修改、改进和完善,具有自适应自学习的能力。它比一般的模糊控制器增加了三个环节:性能量测、控制量校正和控制规则修正。性能量测环节用于测量实际输出特性与希望特性的偏差,以确定输出响应的校正量。控制量校正环节将输出响应的校正量转换为控制量的校正量。控制规则修正环节修改模糊控制器的控制规则,这样就实现了对控制量的校正。自适应模糊控制原理框图如图4所示。图 4自适应模糊控制系统3.专家模糊控制 专家模糊
19、控制是专家系统技术和模糊控制相结合的产物,把专家系统技术引入模糊控制中,目的是进一步提高模糊控制器的智能水平。常规模糊控制器的魅力在于它能在一般的数学分析方法无能为力时提供一种基于规则的控制方法,而且简单易行。但常规的模糊控制方法的局限性在于控制器的结构过于简单,规则库一般只允许一种格式的规则,规则语言还不足以控制复杂过程所需要的启发式知识。专家系统方法重视知识的多层次及分类的需要,以及用这些知识进行推理的计算机组织。专家模糊控制保持了基于规则的方法的价值和用模糊集处理带来的灵活性,同时把专家系统技术的表达、利用知识的长处结合进来。4.神经模糊控制16 神经模糊控制 是指基于神经网络的模糊控制
20、方法。神经网络是人工神经网络的简称,它是由许多神经元作为节点以一定的方式连接在一起的网络,它具有分层的结构。神经网络的基本工作原理是先要提供它足够的典型的学习样本,这些样本必须能相当完善地描述所希望达到的系统的性能。神经模糊控制方法是指用一个神经网络实现常规模糊控制器的功能。就目前的资料应用方法,可以大致分为两类,一类是神经网络实现模糊控制规则及模糊推理,另一种则由神经网络实现全部模糊逻辑控制功能。神经网络技术与模糊逻辑控制相结合的神经模糊控制方法目前还没有达到成熟、完善和系统的地步。5.模糊控制器的结构模糊控制具有快速性、鲁棒性好的特点,可以考虑用它对系统进行控制。在确定性控制系统中,根据输
21、入变量和输出变量的个数,可分为单变量控制系统和多变量控制系统。1.单变量模糊控制器 将其输入变量的个数定义为模糊控制器的维数,其结构图如下图5所示:一维模糊控制器如图(a)所示。一维模糊控制器的输入变量往往选择为受控量和输入给定的误差 E。由于仅仅采用偏差值,很难反映受控过程的动态性品质。因此得不到满意的系统动态性能效果,这种一维模糊控制器通常用于简单的被控对象。如果您需要使用本文档,请点击下载按钮下载!图5单变量模糊控制器二维模糊控制器如图(b)所示。二维模糊控制器的两个输入变量为被控量与给定值的误差量 E 和误差变化量 EC,由于它们能够严格的反映受控过程中输出变量的动态特性,在控制效果上
22、要比一维模糊控制器好的多,它是目前被广泛采用的一种模糊控制器。三维模糊控制器如图(c) 和(d)所示。三维模糊控制器的三个输入变量为系统误差量 E、误差变化量 EC 和偏差变化率 ECC,也可以是 E,EC 和 EC 的积分EI。由于这类模糊控制器结构比较复杂,推理运算时间长,因此除非对动态特性要求特别高的场合,一般较少选择三维模糊控制器。2.多变量模糊控制器 如图6所示,模糊控制器是由多个独立的输入变量和一个或多个输出变量。多变量模糊控制器的变量个数多,且各个变量之间存在着较强的耦合,因此要直接设计多变量模糊控制器相当困难。好在可以利用模糊控制器本身的解耦性质,通过模糊关系方程分解,在控制器
23、结构上实现解耦,便可以将一个多输入多输出 (MIMO) 模糊控制器,分解成若干个多输入单输出 (MISO) 模糊控制器,这样就实现了模糊控制器的降维处理。图6 多变量模糊控制器6.模糊PID复合控制在锅炉汽包水位控制中的应用32 33汽包水位是锅炉给水系统安全、稳定运行的主要指标之一。汽包水位过高会造成汽空间缩小, 将会引起蒸汽带水, 影响汽水分离效果使蒸汽品质恶化, 以致在过热器管内产生盐垢沉积, 管子过热, 金属强度降低而发生爆破; 满水时蒸汽大量带水, 将会引起管道和汽轮机内产生严重的水冲击, 造成设备的损坏。水位过低会造成锅炉水循环的破坏, 使水冷壁管超温过热;严重缺水时,容易使水全部
24、汽化烧坏锅炉甚至爆炸, 造成更严重的设备损坏事故1。因此加强对水位的监视和调整至关重要。这就要求汽包水位在一定范围内, 适应各种工况的运行。由于汽包水位受给水压力和蒸汽压力等外界因素干扰现象严重, 动态特征强, 又有大滞后、多变量、强耦合及非线性等特性,使得传统的PID控制器难以收到良好的控制效果。模糊控制的特点是在偏离工作点较远的区域可明显改善控制的动态性能, 并且对控制对象特性的变化比PID线性控制器具有更强的鲁棒性2。由于模糊控制器本质上属于非线性控制方法,缺乏通用的系统化设计方法,控制器的稳定性难以保证, 控制精度不够高, 并且在工作点附近容易产生极限振荡。实际应用中,模糊控制器的设计
25、和参数整定往往过于依赖现场操作经验和试凑法。本文基于PID 线性控制器和模糊控制器的上述特点,提出一种模糊PID复合控制器3控制锅炉汽包水位的新方法。1.PID各参数对系统性能的影响30如果您需要使用本文档,请点击下载按钮下载!理想的PID 控制器根据给定值 r(t)与实际输出值c(t)构成的控制偏差e(t)e (t) = r (t) -c (t) 将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。u(t)=Ke(t)+式中 u(t)控制器的输出;e(t)控制器的输入,给定值与被控对象输出值的差,即偏差信号; Ke(t) 比例控制项,K为比例系数; 积分控制项,T为积分时间常
26、数 T微分控制项,T 为微分时间常数。PID控制算法:在计算机直接数字控制系统中,PID 控制器是通过计算机PID控制算法程序实现的。进入计算机的连续时间信号,必须经过采样和量化后,变成数字量,才能进入计算机的存储器和寄存器,而在数字计算机中的计算和处理,不论是积分还是微分,只能用数值计算去逼近。PID 控制规律在计算机中的实现,也是用数值逼近的方法。当采样周期 T足够短时,用求和代替积分,用差商代替微商,使 PID 算法离散化,即可作如下近似变换:tkt (k=0,1,2,)式中 T采样周期。将描述连续 PID 算法的微分方程,变为描述离散时间 PID 算法的差分方程,为书写方便,将 e(k
27、T)简化表示成 e(k),即为数字 PID 位置型控制算法,如式 (2-5)所示。 u(k)=Ke(t)+K式中 k采样序号,k= 0,1,2,;u(k)第 k 次采样时刻的计算机输出值;e(k)第 k 次采样时刻输入的偏差值;e(k-1)第 (k-1) 次采样时刻输入的偏差值;K积分系数,K=; K微分系数,K=;如果您需要使用本文档,请点击下载按钮下载!由 (2-6) 式可得u(k)=u(k)-u(k-1) = Ke(k)+Ke(k)+Ke(k)-e(k-1)式中e(k)=e(k)-e(k-1),u(k)即为增量式 PID 控制算法,由第k次采样计算得到的控制量输出增量。可以看出,由于一般
28、计算机控制系统采用恒定的采样周期 T,一旦确定了 K、K、K,只要使用前3次的测量值偏差,即可求出控制量的增量。模糊控制器的核心是控制规则库的建立, 考虑到系统的稳定性、响应速度、超调量和稳态精度储多方面, 必须研究PID各调节参数Kp、Ki 和Kd对系统动、静态性能的影响。(1)比例环节的作用是减少偏差. 比例系数Kp增大可以加快响应速度,减小系统稳态误差, 提高控制精度. Kp过大会产生较大超调, 导致系统不稳定; Kp过小, 可减少系统的超调量, 使系统稳定裕度增大, 但会降低系统的调节精度, 使系统的过渡过程时间延长。(2)积分环节用于消除系统静差,提高系统无差度,但会使系统响应速度变
29、慢,使超调量变大,导致产生振荡. 加大积分系数Ki, 有利于减小系统静差,但过大会使超调量加剧, 甚至引起振荡; 减小Ki有利于系统的稳定, 减小系统的超调量, 但可不利于消除静差。(3)微分环节能反映系统偏差的变化趋势, 可在偏差信号值变得太大之前, 引入一个有效的早期修正信号, 有助于减小超调, 克服振荡, 使之快速趋于稳定, 提高响应速度. 其缺点是抗干扰能力差, 增大微分系数Kd有利于加快系统响应, 但会带来扰动敏感, 抑制干扰能力减弱, 若Kd过大则可能提前制动延长调节时间;反之,若Kd过小,系统调节过程的减速就会滞后, 超调量增加,使系统响应速度变慢, 导致系统的稳定性变差。2.模
30、糊PID控制31常规PID控制只能利用一组固定参数进行在线控制, 这些参数不能兼顾动态性能和静态性能、设计值和抑制扰动之间的协调。为此, 控制系统引入模糊控制,在常规PID 控制器初值的基础上通过对其参数进行在线修改, 以满足不同误差和误差变化率对控制参数的不同要求, 可使被控对象有良好的动、静态性能。模糊PID控制结构是一类被广泛应用的PID控制器, 该控制器一改传统PID控制器固定参数Kp、K i、Kd的控制策略,提出了可以跟踪误差信号等动态改变PID控制器参数的方法,达到改善控制效果,扩大应用范围的目的。由模糊逻辑整定PID控制器的表达式为:由整定公式可以看出,下一步的控制器参数可以由当
31、前控制器参数与模糊推理得出的控制器参数增量的加权和构成。这样, 可以按下式(2)计算控制量:式(2)并不是PID控制器积分项的全部, 正常应该乘以采样周期T, 这里为了简单起见, 将其含于变量K i(k) 中, 上式同样对Kd(k)进行了相应处理。由于计算较困难, 所以引入状态变量x ( k ) =,这样可以推导出状态方程为这时, 式(2)中控制量可以改写为:如果您需要使用本文档,请点击下载按钮下载!复合模糊PID控制器的典型结构如图7所示。图7 复合模糊PID控制器的结构3. 模糊PID控制锅炉汽包水位36确定模糊控制器的结构也就是确定模糊控制器的输入变量和输出变量(即控制量), 基于对系统
32、的分析, 采用偏差E和偏差变化率EC作为模糊控制器的输入, 模糊控制器输出为Kp、Ki、Kd。对偏差E、偏差变化率EC和Kp、Ki、Kd 分别定义了7个模糊子集, 相应的模糊集和论域定义如下:E、EC、和Kp、Ki、Kd的模糊子集均为: NB (负大)、NM (负中) 、NS (负小)、Z(零)、PS(正小)、PM(正中)、PB(正大);E、EC 和Kd 的论域均为: -3,- 2,-1,0,1,2,3;Kp的论域为:-0.45,-0.3,-0.15,0,0.15,0.3,0.45;Ki的论域:-0.06,-0.04,- 0.02,0,0.02,0.04,0.06。隶属度函数在模糊子集NB处选
33、择Z型函数zmf在模糊子集PB处选择S型函数smf,其余均采用三角形对称的全交迭函数。基于if E and EC then (Kp)(Ki)(Kd)规则的模糊蕴含关系, 根据实际的操作经验, 得到模糊控制规则, 建立模糊控制规则表, 如表1、表2、表3 所示。本文选用Matlab模糊逻辑工具箱设计模糊控制器38 40, 并进行模糊控制仿真。在Matlab中运行FUZZY命令, 打开模糊逻辑编辑窗口FIS Editor,建立双输入三输出的模糊系统,模糊推理选用Mamdani推理方法, 去模糊化则选用重心法(centroid)。接着进入隶属度函数编辑器Membersh ip Function Ed
34、itor 窗口, 选用三角形函数trimf Z型函数zmf和S型函数smf建立相应的E、EC、和Kp、Ki、Kd隶属度函数,然后在Rules Editor窗口中输入上述49条控制规则。建立好模糊推理系统后, 取名为“test”输出到工作区, 可供仿真时调用。 如果您需要使用本文档,请点击下载按钮下载!模糊切换方法设计:用于完成模糊PID和线性常规PID 平稳切换的模糊推理规则为:规则中: Uc为线性常规PID的控制输出; Ufz为模糊PID 的控制输出;SE和SE分别为模糊变量E和E的模糊切换隶属函数。根据给出的模糊控制规则, 对k时刻的清晰输入量e(k) 和e(k) 按隶属函数进行模糊化,
35、采用代数积求出前提部分强度则K时刻的模糊PID复合控制器的控制输出为:仿真研究:为验证此控制方案的效果, 用Matlab进行仿真,在蒸汽流量扰动下,汽包水位调节对象的传递函数表示为:其中, TD为蒸汽流量的时间常数, KD为蒸汽流量放大倍数,T1、T2为时间常数。本文中KD=2,时间常数T1=40s, TD=1s, T2=10s。仿真研究时, 传统PID 控制的参数设置为: Kp = 4.5、Ki =0.1、Kd = 2.1; 模糊PID控制中的PID参数的初值同样设置为: Kp=4.5、Ki=0.1、Kd = 2.1; 量化因子ke = 0.6、kec=0.3、ku=0.4。输入信号设置为幅
36、值为1的阶跃输入。汽包水位模糊自整定PID控制系统与常规PID控制系统的动态响应曲线如图8所示。如果您需要使用本文档,请点击下载按钮下载!图7 三种控制器控制下阶跃变化的闭环响应总结:介绍一种模糊PID复合控制方法在锅炉汽包水位控制中的应用, 在工作点附近则主要使用PID 线性控制, 同时, 为了保证两者的平稳过渡, 采用模糊推理完成模糊切换。从系统仿真曲线可以看出, 汽包水位模糊PID复合控制方式取得了比传统PID控制方式更好的控制效果, 其控制速度快、超调量小、稳定性好。如果您需要使用本文档,请点击下载按钮下载!参考文献1孙增圻.智能控制理论与技术M.北京:清华大学出版社,1997: 16
37、9-181.2李士勇.模糊控制和智能控制理论与应用M.哈尔滨:哈尔滨工业大学出版社,19903诸静等.模糊控制原理与应用M.北京:机械工业出版社,1995.4杨纶高仪.糊学原理及应用M,广州:华南理工大学出版社20035王国俊.模糊推理与模糊逻辑J.系统工程学报,1998,13(2):1-166章卫国.模糊控制理论与应用M.陕西:西北工业大学出版社,19997王立新.模糊系统与模糊控制教程M.北京:清华大学出版社,20038王国俊.关于模糊推理的若干基本问题J.工程数学学报,2000,:59一139王国俊.模糊推理的一个新方法J.模糊系统与数学,1999,13(3):1一1010何映思,邓辉文
38、.模糊推理算法的还原性讨论J.2005年模糊逻辑与智能计算联合学术会议论文集,200511 王立新. 模糊系统与模糊控制教程M. 北京: 清华大学出版社,2003.12何映思,邓辉文.模糊推理方法综述J.西南师范大学学报(增刊),2005,613 刘向杰. 模糊控制在电厂锅炉控制中的应用现状及前景J.电网技术,1998,22(11): 4-14.14 王利. 基于FPGA的模糊逻辑控制的硬件实现J.控制工程, 2004,11(1): 34-35.15仪垂杰,韩敬礼.模糊解祸控制的研究与应用J.自动化与仪表.19927(4):54一5616张乃尧.神经网络与模糊控制M,北京:清华大学出版社199
39、817李洪兴.模糊控制器与PID调节器的关系J.中国科学(E辑),1999,29(2):136-145 18Faouzi Bonslama,Akira Ichiltawa.Application of limit fuzzy controllers to stability analysis.Fuzzy Sets and Systems,1992,49: 103-220.19权太范等. 模糊控制技术在过程控制中的应用现状及前景.控制与决策,1988,3(1):59-62.20张化光.复杂系统的模糊辨识与模糊自适应控制.沈阳: 东北大学出版社,1994.21Lee C C. Fuzzy logi
40、c in control system: fuzzy logic controller, Part I,IIJ. IEEETrans. on Systems, Man, and Cybernetics,1990,20(2): 404-435. 22李友善,李军. 模糊控制理论及其在过程控制中的应用M. 北京:国防工业出版社, 1993. 23窦振中. 模糊逻辑控制技术及其应用M. 北京: 北京航空航天大学出版社,1995. 24He S Z. Design of an on-line rule-adaptive fuzzy control system A. IEEE Int. Conf. o
41、n Fuzzy Systems C, San Diego,USA,1992,83-91.25Raju G VS. Adaptive hierarchical fuzzy controller J. IEEE Trans. on Systems, Man, and Cybernetics,1993,23(4):973-980.26张持健,王元航,方明星.高精度模糊PID控制器及其在温度控制中的应用.自动化仪表.2002(7):21-23.27吴晓莉,林哲辉.MATLAB辅助模糊系统设计.西安电子科技大学出版社.2002.8:14-124.28陈克明.模糊控制理论在时滞系统中的应用硕士论文.武汉理
42、工大学.2006.5.29葛薇,朱张青.模糊自适应PID在锅炉汽包水位控制中的应用.自动化技术与应用.2008.6:22-24.30陶永华.新型PID控制及其应用.北京:工业仪表与自动化装置.1998.1:57-62.31李庆春,沈德耀.一种PID模糊控制器(fuzzy PI+fuzzy ID型)J.控制与决策,2009,24(7):1038-1042.32高俊.锅炉汽包水位模糊控制的应用研究J.自动化仪表,2003,24(3):56-59.33鄢波,丁维明, 魏海坤. 工业锅炉汽包水位模糊自适应PID控制系统J.发电设备,2006,4: 276-279.34栗海滨,时广礼.新型模糊PID复合
43、控制器设计及应用J.控制系统,2002,39-42.如果您需要使用本文档,请点击下载按钮下载!35Yu Nanhua,Ma Wentong,Su Ming.Application of adaptiveGrey predictor based algorithm to boiler drum levelcontrolJ.Energy Conversion and Management,2006,47(18-19):2999-3007.36 潘祥亮, 罗利文. 模糊PlD控制在工业锅炉控制系统中的应用J.工业炉,2004,(3): 38-40.37 刘革辉,单杰峰,郑楚光Matlab软件中的Fuzzy Logic工具箱在模糊控制系统仿真中的应用计算机仿真2000,17(5):69-7238 侯北平MATLAB下模糊控制器的设计与应用测控技术2001.(10)39闰伟勇.模糊神经网络在锅炉控制中的应用研究D,北京:华北电力大学200240 张国良. 模糊控制及其MATLAB应用M.西安:西安交通大学出版社,2002.43-56. (注:可编辑下载,若有不当之处,请指正,谢谢!)
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
