《平面四杆机构的运动仿真模型分析报告》由会员分享,可在线阅读,更多相关《平面四杆机构的运动仿真模型分析报告(7页珍藏版)》请在装配图网上搜索。
1、 平面四杆机构的运动仿真模型分析1前言 平面四杆机构是是平面连杆机构的根底,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进展分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速开展,机构设计与运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进展草图建模,通过草图中的尺寸约束、几何约束与动画尺寸等功能确定各连杆的尺寸,之后建立相应的
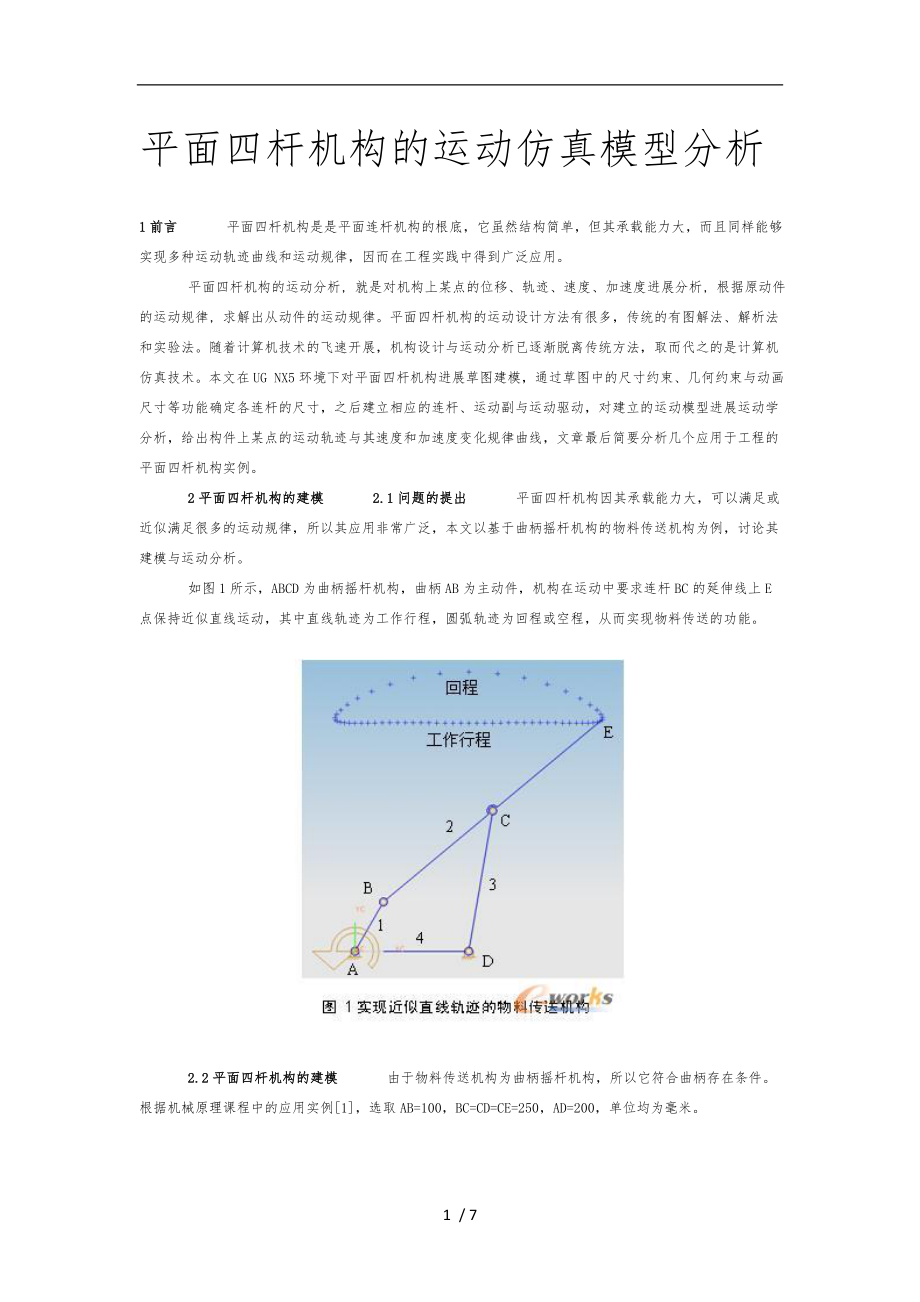
2、连杆、运动副与运动驱动,对建立的运动模型进展运动学分析,给出构件上某点的运动轨迹与其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 2.1问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模与运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。 2.2平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合
3、曲柄存在条件。根据机械原理课程中的应用实例1,选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。在UG NX5的Sketch环境里,创立如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD的夹角从0到360变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3a中的E点为水平轨迹的起点,图3b中的E点为水平轨迹的中点,图3c中的E点为水平轨迹的终点,而图3d中的E点为圆弧轨迹图中未画出即回程的中点。 如E点轨迹不符合设计要求,那么可适当调整各杆
4、件的尺寸,再通过尺寸动画功能检验。 3平面四杆机构运动模型的建立与其分析 3.1运动模型的建立 在UG NX5的Motion环境里,分别建立3个Link连杆即AB、BCE和CD以与4个Revolute Joint旋转运动副,其中J001即A点和J004即D点为AB杆和CD杆的旋转运动副,而且J001还有一个常数驱动,其初始速度为30/Sec,如图4所示。需要指出的是,为了使四杆机构中的E点在后处理中能够生成运动轨迹,需要在E点添加一个关联点Associate Point,在建立连杆BCE时将该点添加到连杆中,然后选择该点作为运动轨迹Trace点,在后处理中将其生成轨迹;同时为了使四杆机构中的E
5、点在后处理中能够生成运动规律曲线,需要在E点添加一个记号点Marker,然后在后处理时选择该记号点作为运动对象Motion Object以生成相关的变化规律曲线。 在运动模型建立后,即可对其进展解算。解算参数设置如下: 解算类型:选择常态运行Normal Run; 分析类型:选择运动学; 时长Time:由于AB杆的初始速度为30度/秒,为了使其能够旋转一周,选择时长为12秒,即12秒30度/秒 =360度; 步数Step:在速度和时长确定后,步数决定该时段运动的快慢,这里选择步数为200。 3.2运动分析与后处理 经过解算,即可对平面四杆机构进展运动仿真显示与其相关的后处理。首先通过动画Ani
6、mation可以观察机构的运动过程,并可随时暂停、回退等,如图5a所示为机构运动过程中某一位置。选择动画中的轨迹Trace选项,继续观察机构的运动过程,即可看到E点所形成的运动轨迹,如图5b所示。 平面四杆机构的运动仿真显示后,还可生成指定记号点的位移、速度、加速度等规律曲线,如图6、图7和图8所示为指定记号点E点的相关曲线包括X轴和Y轴的分量。4工程实例中的平面四杆机构运动模型 以上所述的平面四杆机构的建模与其运动模型的建立以与运动分析和后处理方法,完全可应用于工程中的平面四杆机构2,以下仅简要分析其中3例,因篇幅所限不讨论有关规律曲线。 如图9所示为卡车自动卸料机构,该机构为曲柄摇块机构,
7、其中2为车架机架,摆动油缸3是绕固定铰链C摆动的摇块,导杆4的一端与活塞固连,A、B、C处为转动副,3与4之间为滑动副Slider。油从油缸下部流入时,推动活塞,使与车斗固连的曲柄1绕固定铰链B转动,从而到达卸料的目的,双点划线位置为卸料的初始位置。注意这里的两个极限位置是通过UG NX5/Motion后处理中的整体机构轨迹Trace Entire Mechanism功能得到的,并非由几何作图获得下同。 如图10所示为汽车车门开关机构,该机构为偏置摇杆滑块机构,当摇杆1由动力驱动后绕固定铰链A转动时,带动连杆2与车门固连使滑块3沿固定导路4作往复移动,从而实现汽车车门开关的目的,图中双点划线位置为汽车车门开启状态。这里对滑块3定义了两个运动副,即3与2之间的转动副以与3与4之间的滑动副。 如图11所示为飞机起落架机构,该机构为双摇杆机构,A、D为固定铰链,摇杆1由动力驱动,摇杆3与飞机着陆轮相连,当摇杆1转动时通过连杆2使摇杆3放下或收起,从而实现飞机起落架收放的目的,图中双点划线位置为飞机起落架收起状态。 5结论 通过UG NX5,对平面四杆机构模型进展草图建模,并建立其运动仿真模型,在运动分析后可生成机构上指定点的轨迹曲线,也可输出机构上指定点的位移、速度、加速度等变化规律曲线。通过机构的简要分析,证明以上方法完全可应用于工程实例中的各种平面四杆机构。7 / 7
 平面四杆机构的运动仿真模型分析报告
平面四杆机构的运动仿真模型分析报告