 基本调节规律及PID参数整定.ppt
基本调节规律及PID参数整定.ppt

《基本调节规律及PID参数整定.ppt》由会员分享,可在线阅读,更多相关《基本调节规律及PID参数整定.ppt(18页珍藏版)》请在装配图网上搜索。
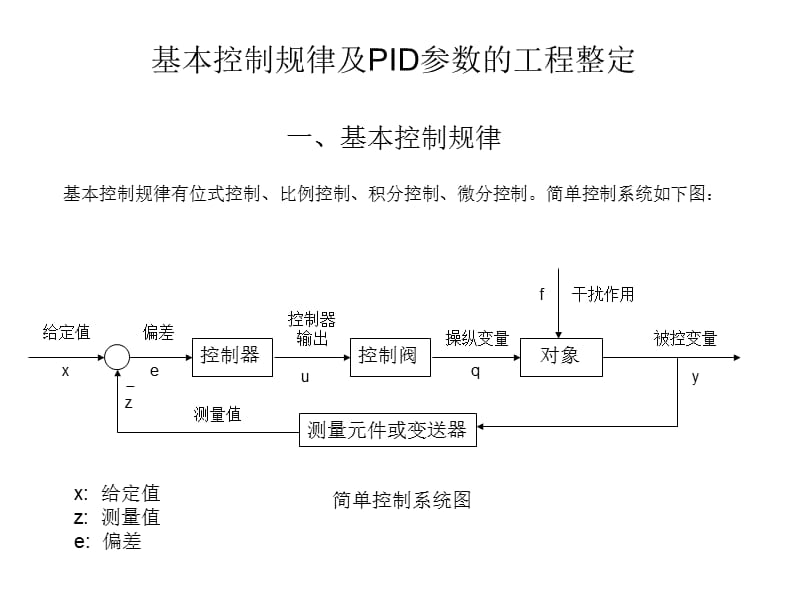
1、基本控制规律及PID参数的工程整定 一、基本控制规律 基本控制规律有位式控制、比例控制、积分控制、微分控制。简单控制系统如下图:,控制器,控制器 输出,控制阀,对象,被控变量,操纵变量,干扰作用,测量元件或变送器,x,给定值,测量值,e, z,u,q,f,y,简单控制系统图,x: 给定值 z: 测量值 e: 偏差,偏差,e(t)x(t)z(t)0,控制器接受了偏差信号e后,就按一定的控制 规律使其输出信号u发生变化,通过执行器改变操纵变量q,以抵消干扰对 被控变量y的影响,从而使被控变量回到给定值上来。 所谓控制器的控制规律就是控制器的输出信号随输入信号(偏差)变化的规律。 表达式如下: u(
2、t)f(xz)f(e) 1.比例控制 在控制系统中,阀门开度的改变量与被控量(如液位)的偏差成比例,这就是比例控制。 u(t)ab e(t) e: 杠杆测量端的位移,即液位变化量 u: 杠杆控制端的位移,即控制阀阀杆的位移量 a.b: 分别为杠杆支点至两端的距离。 u(t)kpe(t) kp是一个可调的放大倍数,改变杠杆支点,便改变 了kp的大小,kp称之为比例增益,它表示比例增益的强弱, 简单的比例控制系统在实际应用中,采用比例度的概念。,e,o,简单的比例控制系统,比例度的意义是:输入信号的相对变化量占输出信号的相对变化量的百分数。 zzmaxzminuumaxumin100% umaxu
3、minzmaxzminzu100% umaxuminzmaxzmineu100% c1/ kp100% zmaxzmin:输入的最大变化量,即仪表的量程; umaxumin:输出的最大变化量,即控制器的工作范围; 由上式可知,比例度与放大倍数kp(比例增益)成反比关系。C是仪表常 数,当输入输出是统一信号时,c=1 1/ kp100% 也就是说,控制器的比例度越小,其放大倍数kp越大,比例控制的作用就越强;反之,比例度越大,比例控制的作用越弱。 比例控制的特点是:反应快,控制及时,但存在余差。 纯比例适用场合:干扰幅度小,纯滞后小,负荷变化不大,控制要求不太高的场合。,2. 积分控制 存在余差
4、是比例控制的缺的, 当控制质量有更高要求时,就需应用 比例加积分控制,以便消除余差。 积分作用:是指控制器的输出与输 入(偏差)对时间的积分成比例的特性。 ui1/Tie(t)d(t) u(t)=kp【e(t)+1/Tie(t)dt】 若偏差A的干扰,代入可得: u(t)=kp(A+At /Ti ) 积分时间:在阶跃输入下,积分 作用的输出变化到比例作用的输出 所经历的时间。引入积分作用虽能 消除余差,但会降低系统的稳定度性, 所以,在引入积分作用后,应适当 降低比例作用(增大比例度或降低比例增益)。,y,y,t,t,et,A,ui(t),At/Ti,积分控制器特性,y,t,e(t),y,t,
5、ui=kpAt/Ti,up=kpA,Ti,A,比例积分控制器特性,积分时间对过渡过程的影响曲线,Ti太小,Ti适当,Ti太大,Ti,y,y,y,y,t,t,t,t,3. 微分控制 微分作用是指控制器的输出与输入变化率成比例关系。其特性可表达为: ud=Td*de/dt 它是根据偏差的变化速度而引入的超前控制作用,只要偏差的变化一发生,就立即动作,故有超前控制作用之称,这是它的优点,但它的输出不能反映偏差的大小,如偏差固定,即使数值再大,微分作用也没有输出。因而控制结果不能消除余差,所以该控制器不能单独使用。它常与比例或比例积分控制器组成比例微分控制或比例积分微分控制。 理想微分控制特性,e(t
6、),to,to,t,t,阶跃输入A的实际微分作用特性曲线,输出值由最大值跌落0.632A(Kd1)所需时间为时间常数,用 T=Td/Kd表示,则微分时间Td=KdT,0.632A(Kd1),0.638A(Kd1),A,T,u(t),t,A.Kd,微分时间对过渡过程的影响曲线,y,y,y,t,t,t,比例微分(PD)控制器由比例和微分两种控制组合而成 比例微分控制器表达式: u(t)=kp【e(t)+Td*de/dt】 对于有容量滞后的对象,采用PD控制器能显著改善控制品质,减少过渡过程偏差,系统稳定性提高。引入微分作用不能消除余差,但余差会有所减少。微分作用对纯滞后的对象不起作用。 比例积分微
7、分(PID)控制器由比例、积分、微分三种控制组合而成 比例积分微分控制器表达式: u(t)= kp【e(t)+1/Tie(t)dt +Td*de/dt】 在工业生产中,常将比例、积分、微分三种作用规律结合起来,称PID控制。它可以得到较为满意的控制质量。其特点是既能快速进行控制,又能消除余差,具有较好的控制性能。 阶跃输入的比例积分微分控制规律响应曲线,e(t),u(t),A,KpA,t,t,二、控制器PID参数的工程整定,所谓控制器参数的整定,就是按照已定的控制方案,确定最合适的控制器比例度,积分时间Ti和微分时间Td。下面介绍几种常用的工程整定法: 1. 经验凑试法 具体步骤为: (1)对
8、于P控制器,将比例度放在较大的经验值上,逐步减少,观察被控量的过渡过程曲线,直到曲线满意为止。 (2)对于PI控制器,先置Ti=,按纯比例作用整定比例度,使之达到4:1衰减过程曲线,然后,将放大10%20%,将积分时间由大到小逐步加入,直至获得4:1衰减过程。 (3)对于PID控制器,将Ti=0, 先按PI作用凑试法整定好、Ti参数,然后将减低到比原值小10%20%的位置,Ti也适当减小后,再把Td由小到大地逐步加入,观察过渡过程曲线,直到获得满意的过渡过程曲线为止。,控制器整定参数经验范围,注意:、Ti过小和Td过大都会产生周期的激烈振荡,但是Ti过小时,引起的振荡周期较长,过小引起的振荡周
9、期较短,Td过大引起的振荡周期最短。,2. 临界比例度法 又称稳定边界条件法,是应用较广的参数整定方法。具体整定步骤为: (1)将Ti=,Td=0,根据广义对象特性选择一个较大的值,并在工况稳定的前提下将控制系统投入自动状态。(广义对象包括: 被控对象、测量变送环节、执行器) (2)做设定值干扰试验,逐步减小比例度,直至出现等幅振荡为止,记下此时控制器的比例度k和振荡曲线得周期Tk。,t,t,r设定值,ro,y被控量,Tk,临界比例度试验曲线,(3)按下表的经验公式计算出衰减振荡时控制器的参数值并设置于控制器上,再做设值扰动试验,观察过渡曲线。若曲线不满足控制质量,则再对计算值做适当调整。 临
10、界比例度法参数计算表,注意:a. 当控制系统的临界比例度k很小,使控制阀处 于位式控制状态时,不宜使用此法。 b. 生产工艺不允许被控量做较长时间的等幅振荡 时,也不能用此法(如锅炉给水,燃烧系统等)。,3. 衰减曲线法 衰减曲线法是针对经验凑试法和临界比例度法的不足,并在此基础上经过反复试验而得出的一种参数整定方法。过渡过程达到4:1递减比的整定方法如下: (1)将Ti=,Td=0,在纯比例作用下系统投入运行,按经验法整定比例度,直至出现4:1衰减过程为止,此时的比例度记为s,衰减振荡周期为Ts。,r设定值,y,1,t,(2)根据已测得的s,Ts值,按表所列经验关系计算出控制器的整定参数值。
11、,4:1过程控制器整定参数表,参数范围,控制系统,(3)根据上述计算结果设置控制器的参数值,做设定值扰动试验,观察过渡过程 曲线,如果曲线不理想,在适当调整参数值,至符合要求为止。 过渡过程达到10:1衰减曲线的整定方法如下: (1)步骤和要求与4:1衰减曲线法完全相同,仅采用的经验计算公式不同。,10,t,y,y,0,10:1过程控制器整定参数表 (2)4:1;10:1过程参数表是根据自动控制原理,按一定的递减率要求整定系统 的分析计算,再对大量实践经验加以总结而得出的。,表中的s系指控制过程出现10:1递减比时的比例度,Tr系指达到第一个波峰值的飞升时间。,伍世泽制作 2011.06.19.,
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- MSA演示文稿教学课件
- 习作:可爱的小猫ppt课件
- PCB的生产安全与卫生防护培训课件培训课件
- 同济大学-混凝土基本原理顾祥林ppt课件-第五章--受弯构件正截面受力性能
- 习作(第七单元)国宝大熊猫ppt课件
- PCB电测兼容设计课件
- 多彩的消费(2019届一轮复习)ppt课件
- 二手车的静态检查三ppt课件
- 二年级下册语文ppt课件第三单元复习课件人教部编版
- 二年级下册语文人教部编版18-太空生活趣事多公开课一等奖优秀ppt课件
- 二年级数学下册第一单元2不同方法整理数据ppt课件
- 多角度分析《哈姆雷特》ppt课件
- 大学物理-第三章-1-杨氏双缝干涉ppt课件
- PCB新工艺流程培训教程(-)课件
- 二年级作文指导ppt课件第8课吹气球
相关资源
更多 (福建专版)2019春七年级生物下册 第四单元 生物圈中的人 第二章 人体的营养、第三章整合课件 新人教版.ppt
(菏泽专版)2019年中考物理 第一部分 系统复习 成绩基石 第1章 测量初步与机械运动课件.ppt
(课标通用)安徽省2019年中考化学总复习 第10单元 酸和碱 课时2 酸碱中和反应与溶液的酸碱性课件.ppt
(襄阳专用)八年级英语上册 Unit 4 What’s the best movie theate写作小专题新人教 新目标版.ppt
(贵阳专用)2019中考数学总复习 第二部分 热点专题解读 专题六 函数的综合探究课件.ppt
固有免疫系统及其应答.ppt
国IV天锦发动机不能启动故障案例分析.ppt
国产汽车行业分析.ppt
团队心理辅导技术.ppt
学校校本研修情况总结报告(四页)
(福建专版)2019春七年级生物下册 第四单元 生物圈中的人 第二章 人体的营养、第三章整合课件 新人教版.ppt
(菏泽专版)2019年中考物理 第一部分 系统复习 成绩基石 第1章 测量初步与机械运动课件.ppt
(课标通用)安徽省2019年中考化学总复习 第10单元 酸和碱 课时2 酸碱中和反应与溶液的酸碱性课件.ppt
(襄阳专用)八年级英语上册 Unit 4 What’s the best movie theate写作小专题新人教 新目标版.ppt
(贵阳专用)2019中考数学总复习 第二部分 热点专题解读 专题六 函数的综合探究课件.ppt
固有免疫系统及其应答.ppt
国IV天锦发动机不能启动故障案例分析.ppt
国产汽车行业分析.ppt
团队心理辅导技术.ppt
学校校本研修情况总结报告(四页)